
Міністерство освіти і науки України
Сумський державний університет
Кафедра комп’ютеризованих систем управління
Курсова робота
з дисципліни “Теорія автоматичного управління”
на тему
“Синтез систем з підпорядкованим регулюванням ”
Варіант № 4
Суми, 2021 рік
Зві
Вступ 3
1. Завдання курсової роботи 4
2. Структурна схема САР 4
3. Знаходження рівнянь ланок 5
3.1. Складання рівняння тиристорного перетворювача 5
3.2. Складання рівняння двигуна постійного струму з незалежним збудженням 7
3.3. Розрахунок здавачів струму і частоти обертання ДПС 9
3.4. Розрахунок внутрішнього контуру за умови його настроювання на модульний оптимум (МО) 10
3.5. Розрахунок внутрішнього контуру за умови його настроювання на симетричний оптимум (СО) 12
3.6. Розрахунок параметрів регулятора за умови настроювання зовнішнього контуру на МО 14
3.7. Розрахунок параметрів регулятора за умови настроювання зовнішнього контуру на СО 15
3.8. Розрахунок кута струмообмеження 16
4. Моделювання САР в Matlab. Графики перехідних процесів 18
4.1. Моделювання САР в Matlab до розділу 3.4 18
4.2. Моделювання САР в Matlab до розділу 3.5 18
4.3. Моделювання САР в Matlab до розділу 3.6 19
4.4. Моделювання САР в Matlab до розділу 3.7 20
Висновок 22
Список використаних джерел 23
Вступ
Теорія автоматичного управління (ТАУ) в широкому розумінні цього слова є теорією побудови і функціонування систем автоматичного управління (САУ).
САУ можна розділити на дві характерні групи, які відрізняються одна від одної як за принципом управління, так і за особливостями функціонування, – розімкнуті САУ, що базуються на принципі керування за збуренням, і замкнуті САУ, які діють на основі принципу керування за відхиленням.
При відхиленні від стану рівноваги в надходженні та витратах енергії через дію збурень у системі виникає відхилення регульованої величини від заданого значення. Це приводить до включення в роботу регулятора, який намагається його зменшити, внаслідок цього виникає перехідний процес.
Основним завданням ТАУ є оцінка поведінки САУ у перехідних режимах.
Важливим є дослідження поведінки САУ у стані рівноваги, де визначаються статична точність та інші статичні характеристики системи.
Можна виділити основні особливості ТАУ:
оцінка САУ в перехідних режимах за характеристиками окремих ланок системи;
тісний взаємозв’язок в дослідженні питань динаміки і статики;
вивчення САУ, різних за своїми фізичними властивостями.
Отже, ТАУ можна визначити як науку, що вивчає статичні та динамічні властивості САУ, принципи побудови структурних схем, методи вибору параметрів на основі вимог якості системи.
Завдання курсової роботи
У структурній схемі автоматизованого електропривода, схема якого наведена в додатку А, а вхідні параметри наведені в додатку Б, розрахувати передатні функції всіх ланок САУ, забезпечити настройку внутрішнього та зовнішнього контурів регулювання на МО та СО, провести розрахунки відповідних регуляторів. Провести моделювання поведінки перехідних процесів в системі при умові ненавантаженого та навантаженого об’єкту управління. Провести розрахунок кута струмообмеження.
Таблиця 1.1. Вхідні дані для виконання курсової роботи
оцінка САУ в перехідних режимах за характеристиками окремих ланок системи;
тісний взаємозв’язок в дослідженні питань динаміки і статики;
вивчення САУ, різних за своїми фізичними властивостями.
Завдання курсової роботи
| №з/п | Rя, Ом | Lя, мГн | Uян, В | Iян, А | nн, об/хв | J, кг·м2 | Iямах/Iян=k |
| 4 | 0,29 | 32 | 196 | 42 | 955 | 0,29 | 2,6 |
Структурна схема САР
Рисунок 2.1 – Структурна схема САР
Список умовних скорочень та позначень:
РШ – регулятор швидкості;
ОС – обмежувач струму;
РС – регулятор струму;
ТП – тиристорний перетворювач;
ЯЦ – якірна цеп;
ДС – давач струму;
ДШ – давач швидкості;
МЧ – механічна частина.
Знаходження рівнянь ланок
Рівняння замкнутої САР отримують на основі рівнянь ланок, з яких складається дана система. При складанні рівняння замкнутої САР виходять з вірогідності принципу детектування, згідно з яким у САР існує напрямленість дії ланок – від попередньої до наступної.
При цьому реакцією наступної ланки на попередню нехтують. Тому рівняння динаміки ланки, взятої окремо, буде таким, як і цієї ланки в деякий САР.
На практиці направленість дії ланок у САР забезпечується наявністю в системі детектуючих ланок, які можуть передавати енергію лише в одному напрямку. Прикладами можуть бути різноманітні підсилювачі та серводвигуни.
Отже, дивлячись на задану САР видно, що вона складається з певних складових, таких як :
тиристорний перетворювач;
двигун постійного струму;
давач струму;
давач частоти;
регулятор струму;
регулятор швидкості;
струмообмежувач.
Вході виконання курсової роботи будемо розглядати кожну складову окремо.
Складання рівняння тиристорного перетворювача
Безперервний сигнал керування
 , що надходить до тиристорного перетворювача (ТП), подається насамперед до системи імпульсно-фазового керування (СІФК), яка є частиною ТП.
, що надходить до тиристорного перетворювача (ТП), подається насамперед до системи імпульсно-фазового керування (СІФК), яка є частиною ТП.З її допомогою сигнал перетворюється на послідовність керуючих імпульсів, які формуються генератором імпульсів і мають відповідне відхилення по фазі щодо моменту відкриття тиристора.
Змінюючи величину відхилення фази керуючих імпульсів, тиристорний перетворювач виконує зворотне перетворення дискретних сигналів у кусково-неперервний сигнал вихідної величини
 або
або , який подається в якірне коло двигуна М.
, який подається в якірне коло двигуна М.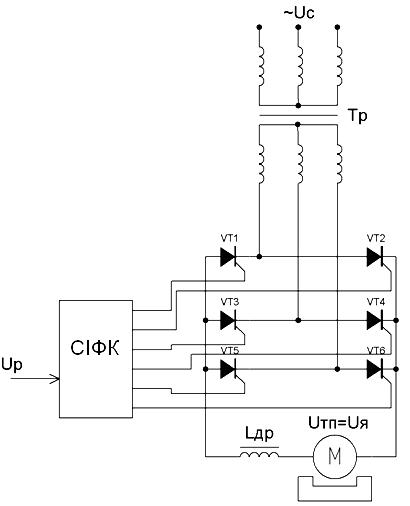
Рисунок 3.1.1 – Схема тиристорного перетворювача.
Згідно з теоремою Котельникова, тиристорний перетворювач без втрат інформації пропускає сигнали, частоти яких менші за граничну частоту

де
 – кількість фаз перетворювача; m=2πf – частота напруги мережі; f – частота в герцах.
– кількість фаз перетворювача; m=2πf – частота напруги мережі; f – частота в герцах.Якщо частота проходження дискретних імпульсів
 де
де  - період квантування, то ТП можна лінеаризувати (апроксимувати) лінійною без інерційною ланкою з коефіцієнтом підсилення
- період квантування, то ТП можна лінеаризувати (апроксимувати) лінійною без інерційною ланкою з коефіцієнтом підсилення  .
.Щоб зменшити негативний вплив можливих автоколивань, обмежують швидкість зміни вхідного сигналу керування
 , який визначає швидкість зміни кута керування
, який визначає швидкість зміни кута керування  . Для цього на вході СІФК ТП підключають аперіодичну ланку. Ця ланка в реверсивному електроприводі повинна обмежувати динамічний зрівнювальний струм, що виникає між випрямляючою та інвертуючою групами вентилів і може в багато разів перевищувати статичний зрівняльний струм.
. Для цього на вході СІФК ТП підключають аперіодичну ланку. Ця ланка в реверсивному електроприводі повинна обмежувати динамічний зрівнювальний струм, що виникає між випрямляючою та інвертуючою групами вентилів і може в багато разів перевищувати статичний зрівняльний струм. Внаслідок цього обмежувальні реактори, які розраховані на статичний зрівняльний струм, можуть бути насичені його динамічною складовою, і зрівняльний струм досягне свого аварійного значення. Щоб уникнути такої небезпеки, стала аперіодичної обмежувальної ланки на вході СІФК повинна знаходитись в інтервалі 0,006 – 0,01 с при промисловій частоті
 Таким чином,
Таким чином,  .
.Орієнтуючись на роботу ТП в режимі безперервного струму, розглянемо ТП як елемент, що складається з двох послідовно з’єднаних ланок: лінійної без інерційної з коефіцієнтом підсилення
і ланки чистого запізнення з запізненням  .
.Рівняння динаміки згідно з викладеним вище матиме вигляд
 (3.1.1)
(3.1.1)Розклавши функцію
 в степеневий ряд і обмежившись двома першими членами, дістанемо рівняння підсилювача у вигляді
в степеневий ряд і обмежившись двома першими членами, дістанемо рівняння підсилювача у вигляді  (3.1.2)
(3.1.2)де
 – середньостатистичне запізнення.
– середньостатистичне запізнення.Складання рівняння двигуна постійного струму з незалежним збудженням
Вихідною величиною в даному разі буде швидкість обертання ω, яка регулюється зміною напруги U, що подається в якірне коло двигуна. Таким чином, треба встановити в динаміці залежність ω=f(u). Записуємо рівняння електричної рівноваги для якірного кола двигуна, маючи на увазі, що в режимі двигуна напруга живлення обчислюється за формулою
 (3.2.1)
(3.2.1)де
 - індуктивність і активний опір кола якоря;
- індуктивність і активний опір кола якоря;  - проти-ЕРС (електрорушійна сила) двигуна.
- проти-ЕРС (електрорушійна сила) двигуна.Для режиму розгону двигуна можна записати рівняння динаміки у вигляді

де
 - відповідно динамічний, двигунів і статичний моменти двигуна. Коли статичний момент невеликий, тобто
- відповідно динамічний, двигунів і статичний моменти двигуна. Коли статичний момент невеликий, тобто  , то можна записати
, то можна записати
звідки

де
 - момент інерції двигуна;
- момент інерції двигуна;  - стала струму.
- стала струму.Підставляючи знайдене значення
 в рівняння електричної рівноваги кола якоря двигуна, після деяких перетворень дістанемо
в рівняння електричної рівноваги кола якоря двигуна, після деяких перетворень дістанемо . (3.2.2)
. (3.2.2)Введемо позначення:



 с.
с.Коефіцієнт двигуна
 визначимо за паспортними даними для номінального режиму у статиці:
визначимо за паспортними даними для номінального режиму у статиці:  ,
,Звідки
 . (3.2.3)
. (3.2.3) .
.При цьому рівняння динаміки двигуна постійного струму в операторній формі матиме вигляд

Та остаточно передатна функція двигуна буде
 . (3.2.4)
. (3.2.4)Якщо
 або
або  , то двигун при даному співвідношенні параметрів буде аперіодичною ланкою другого порядку, а в протилежному випадку – коливальною ланкою.
, то двигун при даному співвідношенні параметрів буде аперіодичною ланкою другого порядку, а в протилежному випадку – коливальною ланкою.Визначимо коефіцієнт Тм:
 де
де 
тоді

Таким чином
 тобто двигун є аперіодичною ланкою другого порядку.
тобто двигун є аперіодичною ланкою другого порядку.Аналіз передаточної функції двигуна постійного струму з незалежним збудженням може бути представлена послідовним з'єднанням аперіодичної ланки першого порядку і інтегруючої ланки, охопленої від'ємним зворотнім зв’язком по частоті обертання.
Рисунок 3.2.1 – Структурна схема двигуна постійного струму
З урахуванням наведеної структурної схеми двигуна отримуємо повний вираз для передаточної функції в залежності від обох зовнішніх впливів:
 . (3.2.5)
. (3.2.5)Отже, підставимо розраховані значення:
 .
.Потрібно відмітити, що в статичному режимі (при р = 0) формула (3.2.5) співпадає з відомою формулою механічної характеристики ДПС:
 ,
, .
.Розрахунок здавачів струму і частоти обертання ДПС
Функціями здавачів є перетворення вимірювальних величин в електричний уніфікований сигнал. При цьому максимальне значення вимірювальної величини повинно відповідати так званої напруги схеми Uсх, під якою розумують номінальну значення сигналів у схемі управління.
Сучасні схеми побудовані на основі транзисторів, операційних підсилювачів та інтегральних мікросхем, в яких величини сигналів складають 5 – 10 В. Візьмемо Uсх=10 В.
а) Розрахунок коефіцієнта передачі здавача струму.
Чутливим елементом для здавача струму є шунт. Шунт являє собою прецизійний опір стійкий до температурних коливань. Значення опору відбирається таким, що при номінальному струмі, який проходить через нього, падіння напруги на ньому складало 75 мВ. Тому коефіцієнт передачі здавача струму
 КДС=UДС /ія=Uсх /Ія мах, (3.3.1)
КДС=UДС /ія=Uсх /Ія мах, (3.3.1)де
Ія мах=k* Ія ном .
Підставивши, отримуємо:
 .
.б) Розрахунок здавача частоти обертання ДПС.
Здавач частоти обертання ДПС будується на основі тахогенератору, який перетворює механічне обертання вала в електричний сигнал. Отже, коефіцієнт передачі здавача частоти обертання буде
КДШ=UДШ /ω=Uсх /ωн=60 Uсх /(2*3,14*n), (3.3.2)
 .
.Розрахунок внутрішнього контуру за умови його настроювання на модульний оптимум (МО)
Відповідно до схеми, наведеної в додатку А, САУ двигуна постійного струму з незалежним збудженням буде мати два контури регулювання: внутрішній (контур струму) і зовнішній (контур регулювання швидкості обертання двигуна).
Незмінна частина внутрішнього контуру з урахуванням тиристорного перетворювача буде мати наступний вигляд (рис.3.4.1).
Рисунок 3.4.1 – Незмінна частина внутрішнього контуру САУ ДПС з незалежним збудженням (
 – тиристорний перетворювач;
– тиристорний перетворювач;  – якірне коло;
– якірне коло;  – здавач струму).
– здавач струму).В даному випадку
 .
.При налаштуванні на МО в дану систему необхідно ввести регулятор струму
 і забезпечити структурну компенсацію елементів кола зворотного зв’язку шляхом введення компенсаційного елемента (kдс) послідовно до контуру регулювання (рис.3.4.2). Тоді в результаті компенсації систему можна розглядати як систему з одиничним зворотнім зв’язком.
і забезпечити структурну компенсацію елементів кола зворотного зв’язку шляхом введення компенсаційного елемента (kдс) послідовно до контуру регулювання (рис.3.4.2). Тоді в результаті компенсації систему можна розглядати як систему з одиничним зворотнім зв’язком.
Рисунок 3.4.2 – Структурна компенсація передатної функції датчика струму
 .
.Відповідно до принципу структурно-параметричної оптимізації представимо САУ ДПС у вигляді послідовного сполучення незмінної частини, яка підлягає компенсації, фільтра, що забезпечуватиме необхідну швидкість перехідного процесу в системі і регулятора, який безпосередньо структурно компенсує незмінну частину. Всі ці елементи охоплені одиничним від’ємним зворотнім зв’язком (рис.3.4.3).
Рисунок 3.4.3 – Еквівалентна схема САУ ДПС зображена у відповідності
до принципів структурно-параметричної оптимізації. (
- регулятор, який забезпечує налаштування внутрішнього контуру на МО; - фільтр;
- фільтр;  - незмінна частина внутрішнього контуру, що підлягає компенсації).
- незмінна частина внутрішнього контуру, що підлягає компенсації).Розрахунок регуляторів, які забезпечують настройку системи на модульний оптимум, зручно проводити відповідно до формули:
 , (3.4.1)
, (3.4.1)де
 - передатна функція регулятора і-го контуру для настройки його на МО;
- передатна функція регулятора і-го контуру для настройки його на МО;  - незмінна частина і-го контуру;
- незмінна частина і-го контуру;  - постійна часу перехідних процесів в системі.
- постійна часу перехідних процесів в системі.Взагалі наша САУ 2-х контурна, тому і = 1, 2, а внутрішньому контуру відповідає значення і =1. Відповідно, розрахунок регулятора для настройки внутрішнього контуру на МО необхідно провести відповідно виразу:
 . (3.4.2)
. (3.4.2)Підставивши в вираз (3.4.2) значення передатної функції
 отримаємо:
отримаємо: . (3.4.2)
. (3.4.2) Отже, для настройки на МО внутрішнього контуру в нього необхідно ввести ПІ-регулятор струму з коефіцієнтами настройки:
 , (3.4.3)
, (3.4.3)де
 , тоді
, тоді  ,
, ,
, , (3.4.4)
, (3.4.4) .
.При цьому передатна функція внутрішнього контуру буде відповідати передатній функції фільтра Баттерворта 2-го порядку:
 . (3.4.5)
. (3.4.5)Розрахунок внутрішнього контуру за умови його настроювання на симетричний оптимум (СО)
Для забезпечення настройки контуру регулювання на СО, в контур регулювання налаштований на МО (рис.3.4.3), вводиться додатковий ПІ-регулятор:
 . (3.5.1)
. (3.5.1)
Рисунок 3.5.1 – Структурна схема внутрішнього контуру САУ ДТС при умові його настройки на СО.
Параметри ПІ-регулятора
 (3.5.1) розраховуються за умови, що поліном знаменника передатної функції контуру регулювання (рис. 3.5.1) повинен відповідати знаменнику фільтра Баттерворта відповідного порядку. Проведемо відповідні розрахунки.
(3.5.1) розраховуються за умови, що поліном знаменника передатної функції контуру регулювання (рис. 3.5.1) повинен відповідати знаменнику фільтра Баттерворта відповідного порядку. Проведемо відповідні розрахунки.Розрахуємо передатну функцію розімкненого контуру регулювання струму (рис.3.5.1):
 . (3.5.2)
. (3.5.2)Передатна функція замкненого контуру регулювання буде дорівнювати:
 . (3.5.3)
. (3.5.3)Підставивши відповідні значення з урахуванням виразів (3.4.2), (3.4.2), (3.4.3), (3.4.4) та
 маємо:
маємо: . (3.5.4)
. (3.5.4)Очевидно, що знаменник передатної функції (3.5.4) буде відповідати знаменнику фільтра Баттерворта 3-го порядку за умови:
 , (3.5.5)
, (3.5.5) , (3.5.6)
, (3.5.6)  , (3.5.6)
, (3.5.6) с.
с.При цьому передатна функція замкнутого внутрішнього контуру регулювання
 за умови настройки на СО буде дорівнювати:
за умови настройки на СО буде дорівнювати: . (3.5.7)
. (3.5.7)Налаштування системи на СО забезпечує оптимальний час перехідного процесу, дозволяє уникнути статичної помилки по навантаженню, але при цьому значно зростає перерегулювання (≈40%). Цього можливо уникнути, якщо послідовно до контуру регулювання настроєному на СО ввести компенсуючий елемент з передатною функцією рівною:
 , (3.5.8)
, (3.5.8)що забезпечує приведення
 до фільтра Баттерворта не тільки в знаменнику, але й в чисельнику.
до фільтра Баттерворта не тільки в знаменнику, але й в чисельнику.Розрахунок параметрів регулятора за умови настроювання зовнішнього контуру на МО
Структурна схема зовнішнього контуру буде включати в себе механічну частину, оптимізований (налаштований) на МО внутрішній контур, який виконує роль фільтра, що забезпечує необхідну швидкість перехідних процесів в системі (розділ 3.4), а також регулятор швидкості, параметри якого є визначеними за умови налаштування контуру на МО. Перед тим, як проводити налаштування зовнішнього контуру на модульний оптимум, необхідно забезпечити компенсацію передатної функції кола зворотного зв’язку зовнішнього контуру за методикою, наведеною в розділі 3.4 та ввести послідовно до контуру регулювання компенсуючу ланку. Після цього зовнішній контур можна розглянути у вигляді, наведеному на рис. 3.6.1.
Рисунок 3.6.1 – Зовнішній контур регулювання швидкості ДПС.
Розрахунок структури і параметрів регулятора проводиться за формулою (3.4.2) при умові, що і=2, а в якості об’єкта регулювання, який підлягає структурній і параметричній компенсації, буде виступати ланка
 . (3.6.1)
. (3.6.1)З урахуванням сказаного вище, передатна функція регулятора, за умови налаштування зовнішнього контуру на МО, дорівнює:
 , (3.6.2)
, (3.6.2) .
.На основі отриманого вище виразу (3.6.2), можна зробити висновок про те, що для забезпечення настройки зовнішнього контуру на МО, в контур швидкості необхідно ввести П-регулятор з коефіцієнтом настройки рівним значенню
 (3.6.2). При цьому передатна функція зовнішнього контуру регулювання буде рівна передатній функції фільтра Баттерворта 3-го порядку:
(3.6.2). При цьому передатна функція зовнішнього контуру регулювання буде рівна передатній функції фільтра Баттерворта 3-го порядку: . (3.6.3)
. (3.6.3)Якщо промоделювати систему, то можна виявити наявність статичної похибки вихідного сигналу ω по навантаженню Мс, але інші показники якості перехідних процесів в системі будуть оптимальними.
Розрахунок параметрів регулятора за умови настроювання зовнішнього контуру на СО
Аналогічно до налаштування внутрішнього контуру на симетричний оптимум, для настройки зовнішнього контуру на СО в пряме коло контуру регулювання швидкості послідовно вводиться ПІ-регулятор з передатною функцією:
 . (3.7.1)
. (3.7.1)Значення
 та
та  вибираються такими, щоб знаменник передатної функції замкнутого зовнішнього контуру, настроєного на МО, дорівнював знаменнику фільтра Баттерворта відповідного порядку.
вибираються такими, щоб знаменник передатної функції замкнутого зовнішнього контуру, настроєного на МО, дорівнював знаменнику фільтра Баттерворта відповідного порядку.З урахуванням сказаного вище розрахуємо
і .Передатна функція розімкнутого зовнішнього контуру налаштованого на МО дорівнює:
 . (3.7.2)
. (3.7.2)Передатна функція розімкнутого зовнішнього контуру при умові його налаштування на СО буде дорівнювати:
 . (3.7.3)
. (3.7.3)Відповідно передатна функція замкнутого зовнішнього контуру за умови його налаштування на симетричний оптимум дорівнює:
 . (3.7.4)
. (3.7.4)Рівняння знаменника передатної функції
 знаменнику фільтра Баттерворта 4-го порядку може бути забезпечено при умові що
знаменнику фільтра Баттерворта 4-го порядку може бути забезпечено при умові що , (3.7.5)
, (3.7.5) с,
с, . (3.7.6)
. (3.7.6)При цьому в системі не буде статичної похибки за навантаженням, будуть оптимальними показники перехідних процесів за виключенням перерегулювання, яке може приймати великі значення 50%.
Подолати цей недолік можна якщо послідовно до зовнішнього контуру регулювання ввести ланку
 . (3.7.7)
. (3.7.7)Розрахунок кута струмообмеження
Струм якоря визначається величиною керуючого сигналу, який поступає на регулятор струму. При
 неузгодження на вході регулятора струму додатне
неузгодження на вході регулятора струму додатне  , регулятор струму збільшує свій вихідний сигнал, відповідно збільшується напруга тиристорного перетворювача і зростає струм
, регулятор струму збільшує свій вихідний сигнал, відповідно збільшується напруга тиристорного перетворювача і зростає струм  (і оберти двигуна). І навпаки при
(і оберти двигуна). І навпаки при  напруга тиристорного перетворювача зменшується, відповідно зменшується і струм (оберти двигуна в цьому випадку зменшуються).
напруга тиристорного перетворювача зменшується, відповідно зменшується і струм (оберти двигуна в цьому випадку зменшуються).Отже для обмеження струму по максимальній величині (відповідно і обмеження обертового моменту двигуна) повинна виконуватись наступна умова:
 при
при  .
.В нашому випадку
 . Відповідно характеристика нелінійного вузла струмообмеження буде наступна (рис. 3.8.1).
. Відповідно характеристика нелінійного вузла струмообмеження буде наступна (рис. 3.8.1).
Рисунок 3.8.1 – Характеристика вузла струмообмеження.
Даний нелінійний вузол струмообмеження пропускає вхідний сигнал
 один до одного, а при
один до одного, а при  обмежується значенням
обмежується значенням  .
.Якщо при більшому навантаженні або при пуску ДПС струм
хоча б ненабагато перевищить значення  , то при цьому
, то при цьому  стане більшим
стане більшим  , на вході регулятора струму буде від'ємний сигнал, тиристорний перетворювач буде знижувати значення
, на вході регулятора струму буде від'ємний сигнал, тиристорний перетворювач буде знижувати значення  і струм буде зменшуватись до значення
і струм буде зменшуватись до значення  . При рівності вхід регулятора струму буде рівний 0, а його вихід не зміниться.
. При рівності вхід регулятора струму буде рівний 0, а його вихід не зміниться.Якщо вал двигуна заклинить, то в ідеальному випадку спрацювання струмообмеження, двигун зупиниться без механічної поломки. При цьому в якірному колі буде прикладено найбільшу напругу і в заторможеного двигуна по якірному колу буде протікати струм
, рівний . Це цілком вірогідно, так як внутрішній контур настроєний на МО і кращим чином відпрацьовує керуючий сигнал
 , що надходить на внутрішній контур струму.
, що надходить на внутрішній контур струму.Моделювання САР в Matlab. Графики перехідних процесів
Моделювання САР в Matlab до розділу 3.4
Моделюємо схему в Matlab та вводимо розраховані данні у внутрішній контур САУ (рис. 4.1.1):
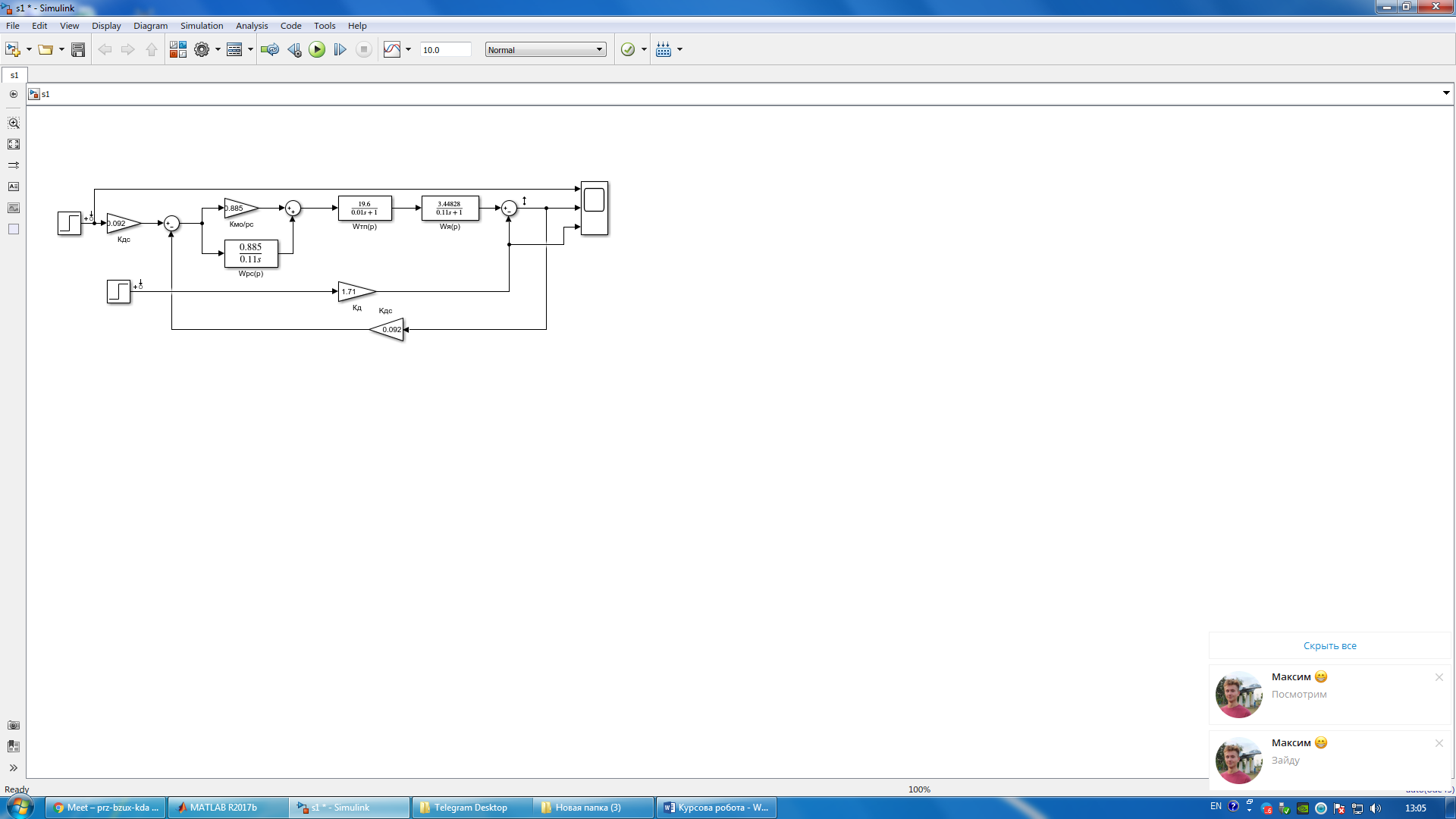
Рисунок 4.1.1 – Модель внутрішнього контуру САР, настроєного на МО
Далі будуємо графік перехідного процесу який має вигляд (рис. 4.1.2):
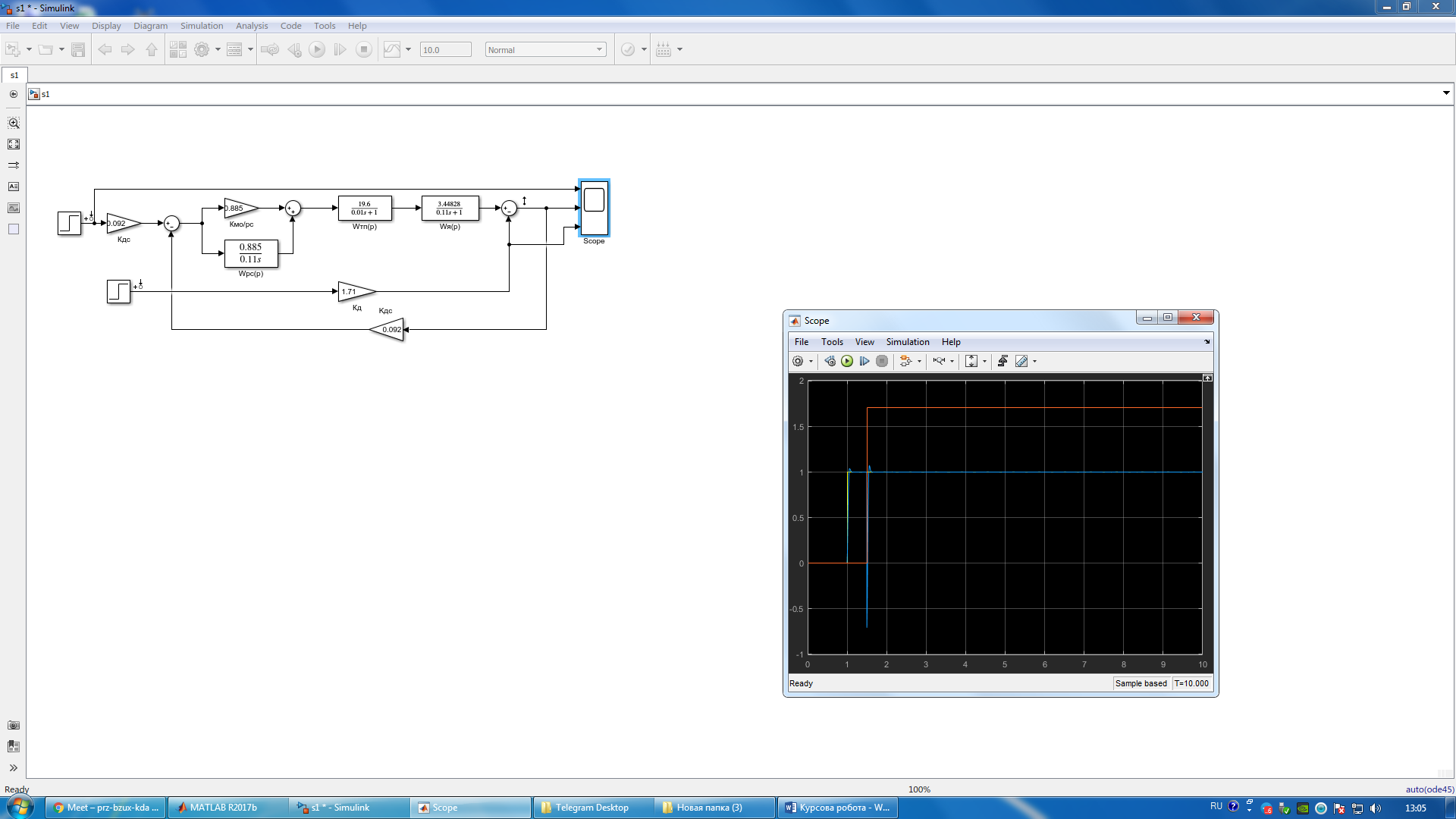
Рисунок 4.1.2 – Графік перехідних процесів при налаштуванні внутрішнього контуру на МО
Моделювання САР в Matlab до розділу 3.5
Моделюємо схему в Matlab та вводимо розраховані данні у САУ (рис. 4.2.1):
Рисунок 4.2.1 – Модель внутрішнього контуру САР, настроєного на СО

Далі будуємо графік перехідного процесу який має вигляд (рис. 4.2.2):
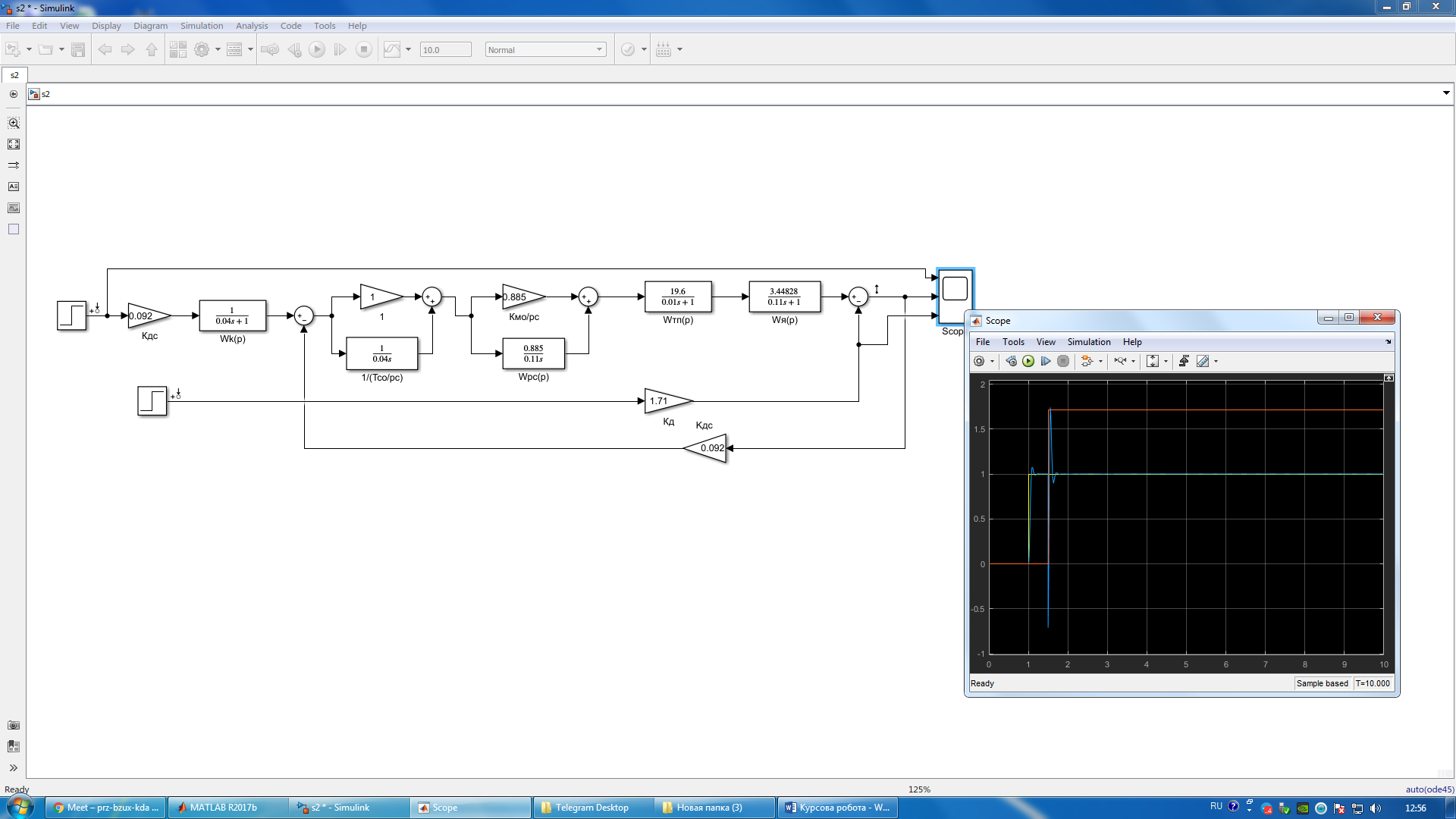
Рисунок 4.2.2 – Графік перехідних процесів при налаштуванні внутрішнього контуру на СО.
Моделювання САР в Matlab до розділу 3.6
Моделюємо схему в Matlab та вводимо розраховані данні у САУ (рис. 4.3.1):
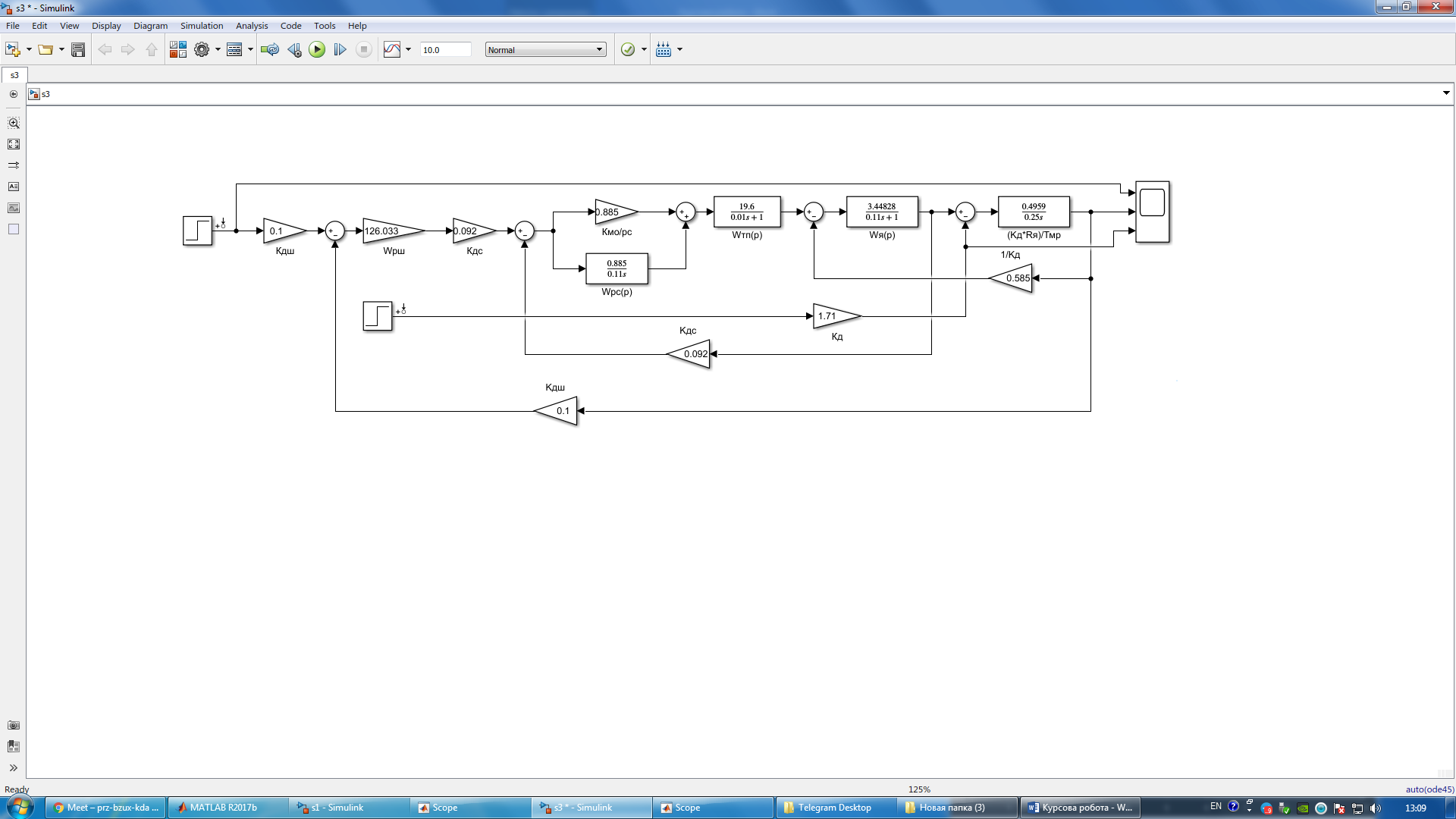
Рисунок 4.3.1 – Модель зовнішнього контуру САР, настроєного на МО
Далі будуємо графік перехідного процесу який має вигляд (рис. 4.3.2):
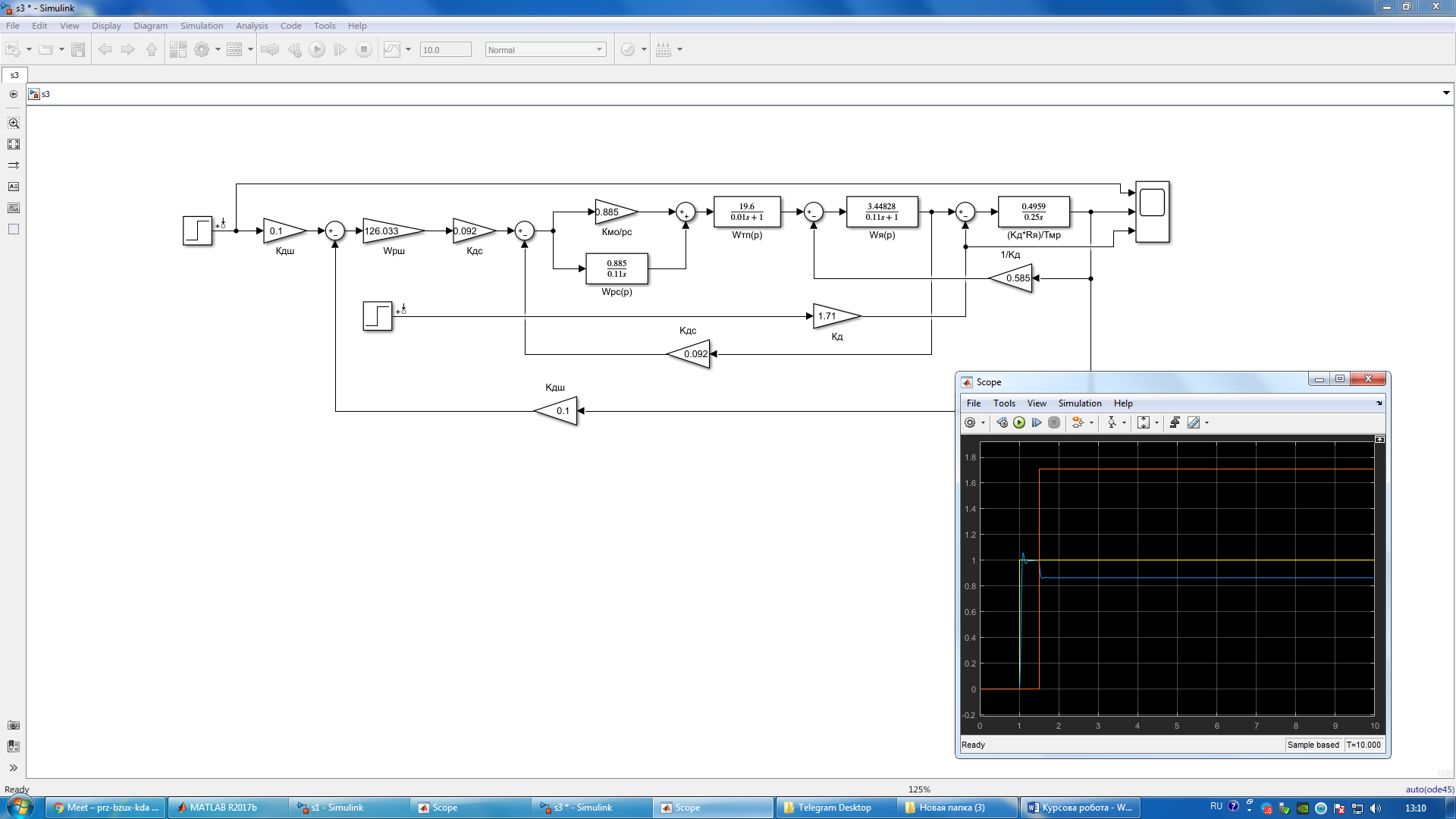
Рисунок 4.3.2 – Графік перехідних процесів при налаштуванні зовнішнього контуру на МО.
Моделювання САР в Matlab до розділу 3.7
Моделюємо схему в Matlab та вводимо розраховані данні у САУ (рис. 4.4.1):
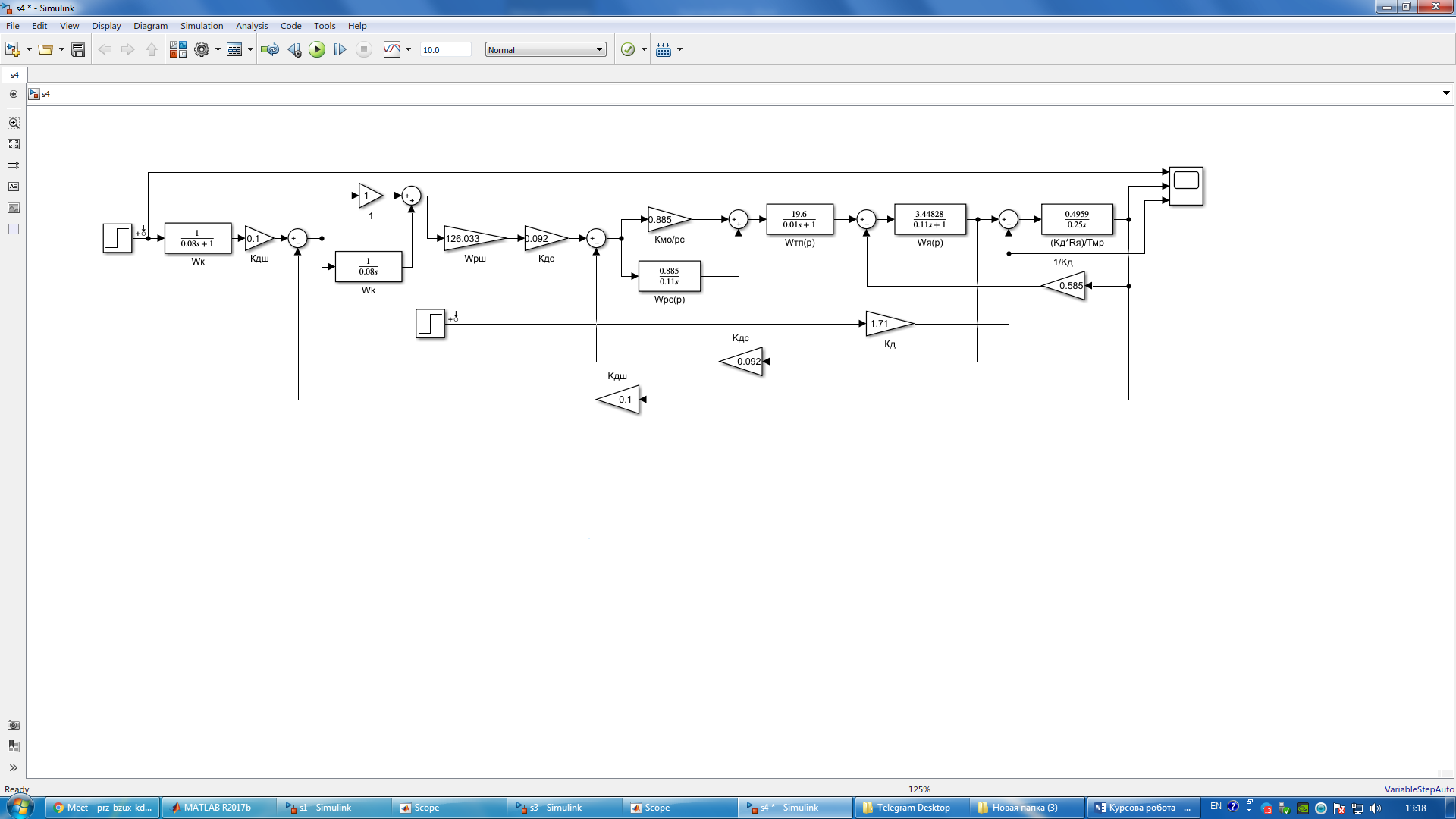
Рисунок 4.4.1 – Модель зовнішнього контуру САР, настроєного на СО
Далі будуємо графік перехідного процесу який має вигляд (рис. 4.3.2):
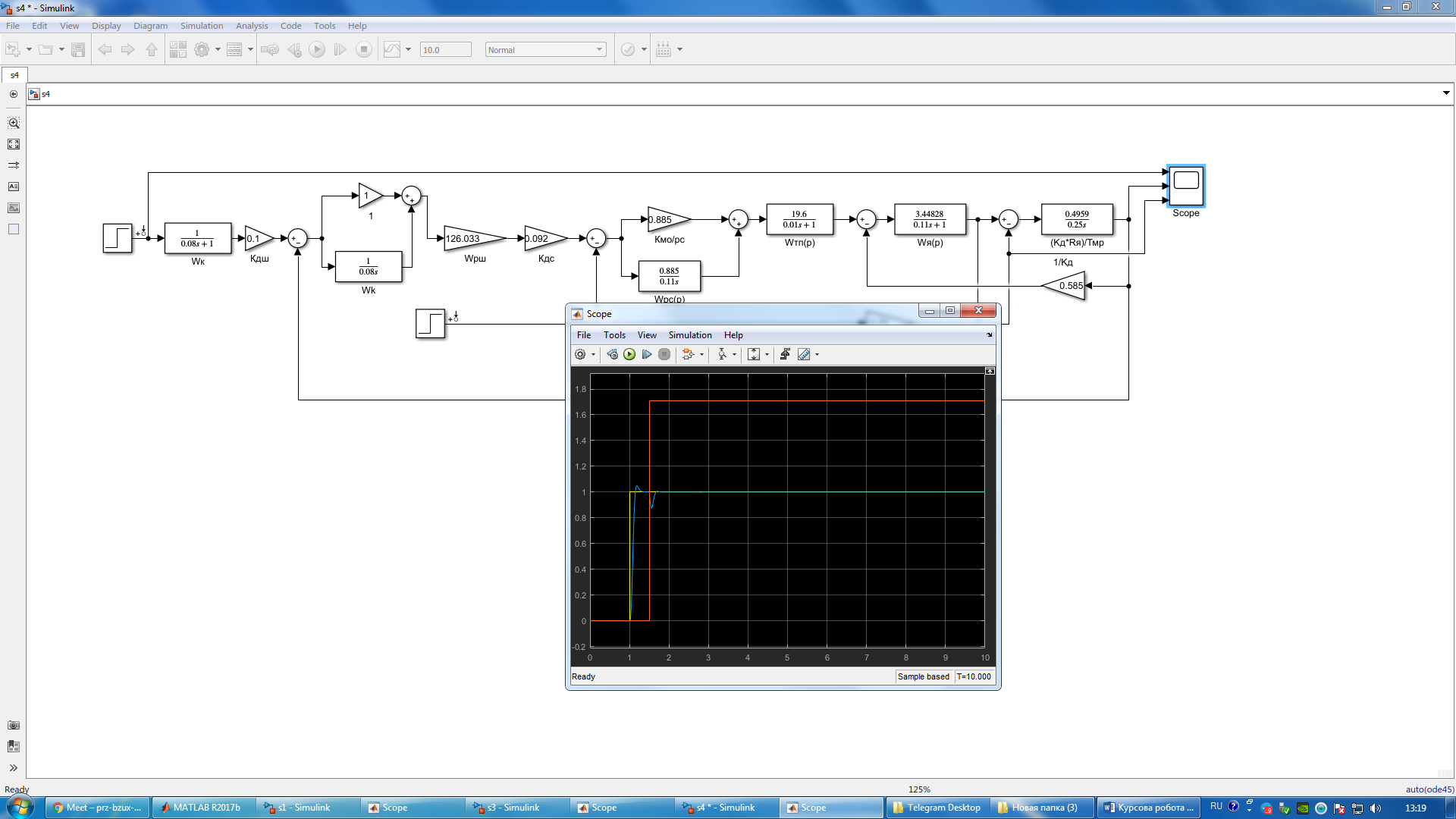
Рисунок 4.4.2 – Графік перехідних процесів при налаштуванні зовнішнього контуру на СО.
Висновок
Для того щоб розпочати виконувати дану курсову роботу потрібно було повторити такий теоретичний матеріал: передатна функція та її застосування, системи підпорядкованого управління, настроювання систем управління на модульний (технічний) та симетричний оптимум, типові алгоритми управління САУ та електронні регулятори, прямі показники якості та точності САУ, принципи моделювання САУ в програмному середовищі MATLAB.
Курсова робота виконувалась відповідно до номера варіанта індивідуально.
При виконання курсової роботи було:
розраховано передатні функції всіх ланок САУ;
забезпечено настроювання внутрішнього та зовнішнього контурів регулювання на МО та СО;
проведено розрахунки відповідних регуляторів;
проведено моделювання поведінки перехідних процесів у системі за умови ненавантаженого та навантаженого об’єкта управління;
проведено розрахунок кута струмообмеження.
Курсова робота виконувалась відповідно до номера варіанта.
У даній курсовій роботі були отримані та закріплені відповідні знання і вмінь: з принципів побудови і синтезу САУ; з проведення математичного опису, моделювання та дослідження САУ; з проведення розрахунків з використанням обчислювальної техніки.
Таким чином, всі завдання виконані, мета виконання курсової роботи досягнута.
Список використаних джерел
Попович М.Г., Ковальчук О.В. Теорія автоматичного керування.– К.: Либідь, 1977.
Лукас В.А. Теория автоматического управления.– М.: Недра, 1990.
Электротехнический справочник. Т.3: Под общ. ред. профессоров МЭИ: И.Н. Орлова (гл. ред.) и др.– М.: Энергоатомиздат, 1988.
Воронов А.А. Основы теории автоматического управления.– М.: Энергия, 1980
Попов Е.П. Теория линейных систем автоматического управления.– М.: Наука, 1989