
НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ УКРАЇНИ
«КИЇВСЬКИЙ ПОЛІТЕХНІЧНИЙ ІНСТИТУТ ІМЕНІ ІГОРЯ СІКОРСЬКОГО»
Кафедра електромеханічних систем автоматизації та електропривод
КУРСОВА РОБОТА
ЕЛЕКТРОМЕХАНІЧНІ СИСТЕМИ АВТОМАТИЗАЦІЇ
ЗАГАЛЬНОПРОМИСЛОВИХ МЕХАНІЗМІВ-2
на тему «Розробка електроприводу системи безперервного транспорту»
Студента 3 курсу ЕП-п71 групи
напряму підготовки Електромеханіка
спеціальності Електромеханічні системи
автоматизації та електропривод
Артемчука І. О.
Керівник _ к.т.н. доцент _ Печеник М.В.________
______________________________________
(посада, вчене звання, науковий ступінь, прізвище та ініціали)
Національна оцінка ________________
Кількість балів: __________Оцінка: ECTS _____
Члени комісії
__________________________________________________________ _______________
(вчене звання, науковий ступінь, прізвище та ініціали) (підпис)
__________________________________________________________ _______________
(вчене звання, науковий ступінь, прізвище та ініціали) (підпис)
__________________________________________________________ _______________
(вчене звання, науковий ступінь, прізвище та ініціали) (підпис)
Київ – 2020 рік
ЗМІСТ
ЗМІСТ 2
1 ХАРАКТЕРИСТИКА ТЕХНОЛОГІЧНОГО ПРОЦЕСУ. ВИМОГИ ДО АВТОМАТИЗОВАНОГО ЕЛЕКТРОПРИВОДУ 4
2 ОБГРУНТУВАННЯ І ВИБІР СИСТЕМ ЕЛЕКТРОПРИВОДУ 9
3 РОЗРАХУНОК ЕЛЕМЕНТІВ СИЛОВОЇ ЧАСТИНИ ЕЛЕКТРОПРИВОДУ 12
3.1 Розрахунок для вибору електродвигуна 13
3.2 Перевірка вибору електродвигуна 15
3.3 Розрахунок натягу набігання та збігання 16
3.4 Практична реалізація системи векторного керування 18
4 ОПИС ЕЛЕКТРИЧНОЇ СХЕМИ 29
ВИСНОВОК 30
СПИСОК ВИКОРИСТАНОЇ ЛІТЕРАТУРИ 31
ДОДАТОК 33
 РЕФЕРАТ
РЕФЕРАТРозрахунково-графічна робота виконана на 34 сторінках, вміщує 7 рисунків, 3 таблиць.
В даній розрахунково-графічній роботі досліджений стрічковий конвеєр, підібраний відповідних асинхронних двигун для забезпечення необхідних умов роботи та була побудована навантажувальна діаграма по розрахованим тяговим зусиллям.
Використовувалися програмні забезпечення для виконання розрахунково-графічної роботи: MS Visio, MS Word.
КОНВЕЄР, ЕЛЕКТРОПРИВІД, ТРАНСПОРТНІ СИСТЕМИ, МАНІПУЛЯТОР, ВАНТАЖОПІДЙОМНІСТЬ, МЕХАНІЗМ, ЕПЮРА, НАТЯГ, ДВИГУН, ПЕРЕТВОРЮВАЧ ЧАСТОТИ, ЕЛЕКТРИЧНА СХЕМА.
1ХАРАКТЕРИСТИКА ТЕХНОЛОГІЧНОГО ПРОЦЕСУ. ВИМОГИ ДО АВТОМАТИЗОВАНОГО ЕЛЕКТРОПРИВОДУ
Призначення конвеєрних (транспортерних) систем
Системи транспортерів (конвеєрів) застосовуються для внутрішньо цехового й міжцехового переміщення, нагромадження й організації технологічних потоків сировини, напівфабрикатів і готової продукції на всіх стадіях процесу виробництва, обробки й складування[1].
Конвеєрні (транспортні) системи вирішують завдання автоматизації й оптимізації процесу виробництва і є невід'ємною частиною різних технологічних ліній, наприклад, ліній фасування або розливу різних харчових і нехарчових продуктів, кондитерських ліній, ліній випічки хлібобулочних виробів.
Сучасні транспортерні системи також дозволяють робити сортування вантажів у процесі їхньому русі по конвеєрній лінії.
Склад конвеєрних (транспортерних) систем
До складу транспортної системи може входити найрізноманітніше встаткування: транспортні секції на базі конвеєрів різного виду, підйомно-опускні транспортери, поворотні транспортери, кантувальники, рольганги, маніпулятори та ін.
Кантувальник — механізм для перевертання (кантівки) виробів при їх виготовленні, транспортуванні або упаковці. До. застосовують в ковальсько-штампувальних, літейних і ін. цехах, в складах на навантажувально-розвантажувальних роботах, при упаковці різних продуктів і так далі.
Рольганг — конвеєр, роликами якого, закріпленими на невеликій відстані один від іншого, переміщаються вантажі. Застосовуються на промислових підприємствах, прохідних печах, складах, як частина транспортних, сільськогосподарських та інших машин.
Маніпулятор — керований пристрій (машина), оснащений робочим органом для виконання рухових функцій, аналогічних до функцій руки людини, під час переміщення об'єктів у просторі.
Конвеєрні системи різних конфігурацій містять у собі:
стрічкові (гумовотканинні, ПВХ) транспортери;
пластинчасті транспортери із пластиковим або нержавіючим ланцюгом;
рольганги – приводні й гравітаційні;
міжповерхові елеватори контейнерів, упакувань і палетів;
дільники потоків продукту, контейнерів і впакувань.
Переваги конвеєрних (транспортерних) систем.
Сучасне конвеєрне (транспортерне) устаткування при своїй конструктивній простоті має ряд серйозних достоїнств:
модульність;
універсальність і можливість створювати траси переміщення вантажів практично будь-якої конфігурації;
можливість розширення конвеєрної системи й зміни її конфігурації при необхідності;
висока продуктивність і ритмічність переміщення вантажів;
повна автоматизація операцій по переміщенню вантажів;
можливість вбудовування в конвеєрне встаткування різних допоміжних пристроїв (ваги, зчитувачі штрих-коду, устаткування по нанесенню маркування на вантаж).
Створення гнучких систем транспортування продукції передбачає: вибір траси транспортування, підбор конвеєрного встаткування, ув'язування технічних характеристик різного технологічного встаткування, розробку оптимального алгоритму керування автоматизованої конвеєрної (транспортерної) системою.
Транспортер (стрічковий конвеєр) використовують для переміщення сипучих, кускових і штучних вантажів на відстані.
Пластинчасті конвеєри призначені для переміщення в горизонтальній площині або з невеликим нахилом важких штучних вантажів, крупно кускових, у тому числі гострокромчатих матеріалів, а також вантажів, нагрітих до високої температури.
Конвеєр – середньо-динамічний вид механізму, в цій системі потрібно забезпечувати більш точне регулювання швидкістю чи моментом, бажано щоб процеси були аперіодичними, а на малих швидкостях забезпечували номінальний момент. Для середньо-динамічних видів механізмів застосовують систему векторного керування без вимірювання кутової швидкості[2].
При виборі типів і параметрів конвеєрів необхідно враховувати умови їх роботи і режим експлуатації[4]. Умови роботи конвеєрів визначаються числом годин роботи в добу і днів роботи в рік, характеристикою встановлення, температурою навколишнього середовища, вологістю чи запиленістю повітря. Режими роботи враховуються при розрахунку елементів конвеєрів на міцність і довготривале використання. Розрізняють 5 режимів роботи: дуже легкий (Весьма легкий - ВЛ), легкий (легкий – Л), середній (средний – С), важкий (тяжелый – Т), дуже важкий (весьма тяжелый – ВТ), які визначаються поєднанням класів використання конвеєрів по часу (времени – В), виробництві(производительность –П), вантажопідйомністьм (грузоподъемность – Н) и натягу гнучкого органу (Ц). Класи використання конвеєрів по часу характеризуються тривалістю їх роботи в добу і в рік.
Класи використання конвеєра по продуктивності характеризується спільним коефіцієнтом загрузки КП=Qc/Qmax, де Qc, Qmax – середня і максимальна продуктивності конвеєра.
Таблиця 1 - Умова роботи конвеєра в залежності від характеристики його встановлення.
| Умови роботи конвеєрів | Характеристика місця встановлення. |
| Легкі | Чисте, сухе, опалювальне, добре освітлене приміщення; відсутня абразивний пил; конвеєр доступний для обслуговування, огляду і ремонту. |
| Середні | Опалювальне приміщення; невелика кількість абразивного пилу; часами вологе повітря; середні освітленість і доступність для обслуговування. |
| Важкі | Неопалюване приміщення; можливі велика кількість абразивного пилу або підвищена вологість повітря; погані освітленість і доступність для обслуговування. |
| Дуже важкі | Дуже курна атмосфера і наявність факторів, що шкідливо впливають на роботу конвеєра. |
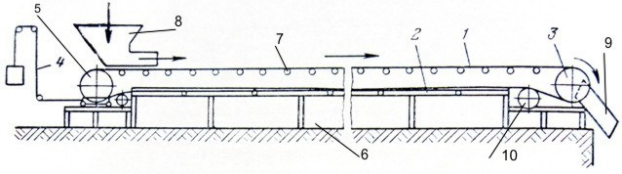
Рисунок 1 Схема стрічкового конвеєра
1 – стрічка конвеєра, 2 – роликовий став, 3 – приводний барабан, 4 – натяжний пристрій, 5 – натяжний барабан, 6 – конвеєрний став, 7 – ролики з роликоопорами робочої гілки, 8 – завантажувальний пристрій, 9 – розвантажувальний пристрій, 10 – відхиляючий барабан.
Вимоги до електроприводу
Електроприводи робочих рольгангів, кантувачів, маніпуляторів, зливковозів працюють у повторно-короткочасному реверсивному режимі з великою частотою включень, що досягає 2000 на годину при ПВ-59÷70%[8].. Великою частотою включень обумовлені високі вимоги до динаміки електропривода: час реверса не повинний перевищувати 25—40мс, діапазон регулювання швидкості (10÷20). При необхідності регулювання швидкості використовується привід по системі: тиристорний перетворювач частоти – двигун, тиристорний реверсивний електропривод постійного струму.
Вимоги, що пред'являються до електроприводу конвеєрів:
1. Регулювання швидкості в невеликому діапазоні.
2. Потрібен підвищений пусковий момент через більший за величиною момент тертя спокою щодо моменту тертя руху.
3. Необхідне забезпечення плавності перехідних процесів - обмеження прискорення та ривка з метою виключення розкачування або пробуксовки механізму і зниження динамічних зусиль при наявності пружних зв'язків. Під час пуску привод конвеєра мав характеристику з поступовим збільшенням пускового моменту до початку зрушення конвеєрної стрічки і обмеженою величиною моменту в процесі розгону до номінальної швидкості.
4. При роботі з декількома приводними барабанами привід повинен забезпечувати синхронізацію роботи приводних барабанів, тобто встановлення розрахункового розподілу тягового зусилля між приводними барабанами.
5. Приводи потужних конвеєрів з високою швидкістю руху стрічки повинні забезпечувати знижену швидкість 1 м / с для проведення її огляду.
1 2 3 4 5