
Ім'я файлу: Реферат1.docx
Розширення: docx
Розмір: 180кб.
Дата: 21.02.2021
скачати
Пов'язані файли:
лаба3.docx
Розширення: docx
Розмір: 180кб.
Дата: 21.02.2021
скачати
Пов'язані файли:
лаба3.docx
Содержание
Вступление
1. Методы контурного анализа. Алгоритм Susan
2. Детектор границ SUSAN «в деталях»
3. Другие методы обнаружения границ
Вывод
Список литературы
Вступление
Анализ изображения представляет собой научную область, которая имеет дело с геометрическими и денситометрическими измерениями, проводимыми на изображениях, полученных от различных источников. Главная область применения подобных измерений и вычислений — количественная микроскопия, позволяющая быстро и точно получать статистически значимые результаты и потому вытесняющая собой традиционные и субъективные качественные методы. Примерами подобных измерений могут являться определение объемной доли различных фаз в некоем сплаве или в геологической пробе, численного и размерного распределения загрязняющих частиц, отфильтрованных из воздушной или жидкой среды, или же распределение интегральной оптической плотности внутри ядер окрашенных биологических клеток.
В настоящее время в лабораториях и на производстве возникает необходимость анализа цифровых фотоснимков, содержащих несколько однотипных объектов, возможно отличающихся друг от друга некоторыми своими параметрами.
Решение данной проблемы наталкивается на определённые сложности реализации существующих разработанных методов анализа, предназначенных для одиночных объектов на снимке.
Методы контурного анализа. Алгоритм Susan
Один из новейших алгоритмов детектора границ был разработан авторами из оборонного исследовательского агентства Великобритании в 1995 году и опубликован в 1996. Его название — SUSAN представляет собой аббревиатуру английских слов Smallest Univalue Segment Assimilating Nucleus (наименьший однородный сегмент, ассимилируемый ядром).
Smith & Brady обратили внимание на то, что соседи каждой точки в однородной области имеют близкую к ней яркость, а вблизи границы число соседей с одинаковой яркостью уменьшается. В соответствии с такой трактовкой границы и был разработан алгоритм детектора границ SUSAN. Кроме границ этот метод обнаруживает и другие особенности на изображении (углы, тонкие линии и т.п.).
Основная идея SUSAN это то, что соседи каждой точки в однородной области имеют близкую к ней яркость, а вблизи границы число соседей с одинаковой яркостью уменьшается. Кроме границ этот метод обнаруживает и другие особенности на изображении (углы, тонкие линии и т.п.). Этот принцип иллюстрирует рисунок 3.
Вокруг каждого пикселя изображения строится маска, центральный пиксель которой называется ядром (в работе используется круглая маска с радиусом 3.4 пикселя, которая включает 37 пикселей или традиционная квадратная маска 3x3). Пиксели в пределах маски, имеющие сравнимую с ядром яркость, образуют область USAN (Univalue Segment Assimilating Nucleus – однородный сегмент, ассимилируемый ядром). Для обнаружения двумерных особенностей и границ используются размер, центр тяжести и вторые моменты USAN. Такой подход обнаружения особенностей отличается от известных методов тем, что не использует производных изображения и, следовательно, нет необходимости в предварительном подавлении шума.
Рис. 3 – Разные маски, наложенные на изображение; USAN показаны белым цветом.
Площадь USAN максимальна, когда ядро находится в однородной (или почти однородной) области изображения, она уменьшается до половины этого максимума вблизи прямой границы и уменьшается еще больше вблизи угла и достигает локальных минимумов точно на границе и в углах. Это свойство площади USAN используется как главный критерий присутствия границ и двумерных особенностей. На рисунке 4 показаны USAN, как видно, ось Z (площадь USAN) направлена в сторону уменьшения!
Рис. 4 – Трёхмерный график, иллюстрирующий изменение USAN для образца серого изображения.
Сравнивая SUSAN, например, с одним из самых широко используемых детектором границ Canny (объединение операторов градиента и Гауссовского сглаживания) можно отметить следующие особенности и отличия:
Алгоритм Canny обнаруживает единственную границу, т.е. на изображении типа Т – пересекающиеся границы – он изберет один путь построения контура, в то время как SUSAN обнаружит угол и даже выделит его падением площади USAN;
Алгоритм Canny – из-за использования производной сглаживает границы и углы (это конечно плюс при прерывистом контуре, т.к. он замкнёт его); Susan при достаточно хорошем качестве обрабатываемого изображения может идеально правильно показать все особенности формы объекта (объектов!) изображения.
Есть ещё отличия, однако и этих приведенных достаточно, чтобы при обработке изображения ткани (слоя клеток) отдать предпочтение детектору границ SUSAN.
Детектор границ SUSAN «в деталях»
Как уже было сказано выше, этот алгоритм использует круглую маску на 37 пикселей или традиционную 3*3. (Во всех нижеприведенных рисунках, тестах использовалась маска 37 пикселей). Маска помещается в каждую точку изображения, и яркость каждой точки маски сравнивается с ядром (центральной точкой). Исходное простейшее уравнение такого сравнения имеет вид:
 (1)
(1)где
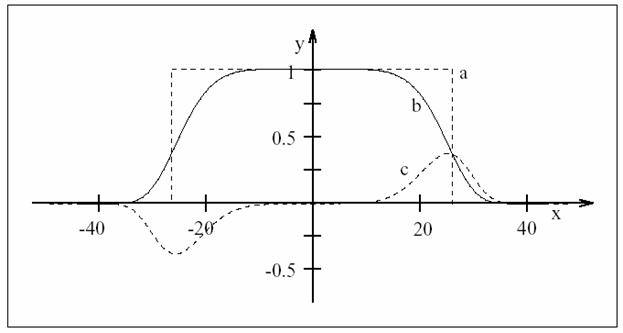
Рис. 5 – а)Вид функции сравнения (по у – безразмерна) разницы яркости пикселей. (В примере t=±27; выражение(1)); b)Непосредственная разница (непосредственный вид функции);
с) Детектор границ (рассмотрен ниже).
Сравнение делается для каждой точки маски и в итоге подсчитываем n как собирательную величину для с:
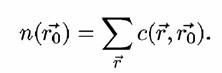 (2)
(2)Итак n и даёт количество пикселей в USAN, т.е. даёт площадь USAN. Данный алгоритм максимально упрощен. Следует учесть, что как и пороговой сегментации, параметр t – различен для каждого изображения и в программной реализации должен быть «настраиваемым».
Далее для детектирования границы n сравнивается с «геометрическим порогом» g, который для большинства изображений можно принять на уровне ¾*nmax. Ответ на границу имеет вид:
 (3)
(3)Описанный алгоритм хорош, однако более стабильные и правильные результаты, особенно при обработке изображений в цвете или высоко градуированных серых, целесообразнее использовать следующую функцию вместо функции (1):
 (4)
(4)Для повышения надежности алгоритма можно использовать центр гравитации (тяжести) SUSAN и основное направление симметрии. В данной работе они не рассматриваются.
Другие методы обнаружения границ
Один из подходов сглаживания изображения основан на представлении изменения изображения, как эволюции его в искусственном времени, и решении соответствующих уравнений в частных производных:
| | (5) |
Для обнаружения границ диффузионный член D должен быть невозрастающей функцией градиента сглаженного изображения, стремящейся к нулю на бесконечности. Таковой, например, является функция
Задача обнаружения границ сильно упрощается, когда заранее известно, что надо найти на сцене. Lakshmanan и др. рассмотрели задачу обнаружения границ, представляющих собой две параллельные прямые линии. Изображения сцены получаются в миллиметровом диапазоне и, в зависимости от диапазона, могут либо иметь множество мелких ненужных деталей (узкий диапазон), либо быть слабо контрастными (широкий диапазон). Стандартные детекторы типа Canny в таких условиях не приводят к хорошим результатам. Учитывая, что границы на сцене представляют собой две параллельные прямые линии:
| | (6) |
авторы задают некоторый начальный шаблон
Noble использует математическую морфологию для нахождения структуры изображения. Описывается несколько различных морфологических операций, которые используются для улучшения границы и обнаружения двумерных особенностей. "Erode-dilate" оператор подобен производной первого порядка, и "open-close" оператор подобен производной второго порядка. Границы хорошего качества обнаруживаются при прослеживании с обеих сторон каждой границы и затем эти "половины границ" сшиваются вместе. Связность в соединениях, как правило, хорошая, хотя иногда появляются ложные короткие "хвосты" в структурах типа Т-соединений. Алгоритм, и особенно часть прослеживания границы, требует довольно больших вычислительных затрат.
Вывод
В результате выполнения данной работы, мною был сделан вывод, что наиболее простым способом выделения контура является пороговая обработка изображения. Однако специфика объекта диагностики такова, что пороговая обработка не дает удовлетворительных результатов. Предварительные результаты (в работе не приведены) показали перспективность применения метода активных контуров при решении задачи. Для корректной работы этого метода необходимо задать начальное приближение в виде замкнутого контура. Это приближение можно получить с использованием пороговой обработки изображения.
Список литературы
Canny J.F. Finding edges and lines in images. / Master’s thesis, MIT, Cambridge, USA, 1983.
Прэтт У. Цифровая обработка изображений. Кн.2./ М.: Мир, 1982. – 784 с.
Smith S.M., Brady J.M. SUSAN – a new approach to Low Level Image Processing.// DRA Technical Report TR95SMMS1b. – 1995. -57p.
Kaas M., Witkin A., Terzopoulos D. Snakes: Active Contour Models. // Int. Journal of Computer Vision. – 1987, N1, -p.312-331.