
РЕФЕРАТ
ПЗ: 65 аркуша, 16 рисунків, 3 таблиці.
ПЛАНИ, ГОДОГРАФ, КРИВОШИП, МЕХАНІЗМ , ПРИСКОРЕННЯ, ДИНАМІКА, РЕАКЦІЇ, ПРИСКОРЕННЯ, МАХОВИК, ЗУБЧАСТА ПЕРЕДАЧА
Тема проекту: «Дослідження механізму конвеєра
Об'єкт проектування і дослідження – механізм приводу конвеєра: важільний, зубчастий.
Мета роботи – синтез і аналіз механізмів конвеєру та диференційного редуктору. Навчитися проектувати та розраховувати схему перетворення обертального руху у поступальний
Проведено синтез і аналіз кінематичних схем і реальних характеристик механізмів приводу конвеєра.
При проектуванні і дослідженні механізмів використані графічні й аналітичні методи з використанням ЕОМ.
ЗМІСТ
РЕФЕРАТ 4
ВСТУП 6
Структурний аналіз механізму конвеєра 7
Синтез кінематичної схеми механізму конвеєра 10
Кінематичне дослідження механізму конвеєра 14
3.1 План положень механізму конвеєра 14
3.2 Визначення швидкостей структурних груп у складі
механізму конвеєра 15
Визначення прискорень структурних груп у складі
механізму конвеєра 21
4.1 Побудова плану прискорень робочого положення механізму 21
4.2 Побудова плану прискорень правого положення механізму 24
4.3 Побудова плану прискорень лівого положення механізму 27
Силове положення механізму конвеєра 30
Силове дослідження групи Ассура у складі ланок 4,5 30
Силове дослідження групи Ассура у складі ланок 2,3 32
6. Силове дослідження вхідної механізму конвеєра 37
7. Дослідження редуктора привода 41
7.1 Характеристики редуктора 41
7.2 Геометричний синтез зубчастих передач редуктора привода 42
7.3 Кінематичне дослідження редуктора аналітичним методом 51
7.4 Кінематичне дослідження редуктора графічним методом 53
7.5 Силове дослідження редуктора 57
ВИСНОВОК 60
ПЕРЕЛІК ДЖЕРЕЛ ПОСИЛАНЬ 61
СПЕЦЗАВДАННЯ 62
ВСТУП
Теорія механізмів і машин (ТММ) – наука, що вивчає загальні закони і принципи побудови машин, що дозволяє виконати перший етап проектування конструкцій, споруд, систем машин і механізмів на основі розроблених нею методів.
В ТММ вивчаються властивості окремих типових механізмів, широко застосовуваних у самих різних машинах, приладах і пристроях. При цьому аналіз і синтез механізмів здійснюється незалежно від його конкретного призначення, тобто однотипні механізми (важільні, кулачкові, зубчасті та ін.) досліджуються одними і тими ж прийомами для двигунів, насосів, компресорів та інших типів машин.
В основі ТММ - методи математичного аналізу, векторної та лінійної алгебри, диференціальної геометрії та інших розділів математики, теореми і положення теоретичної механіки.
Курсове проектування з ТММ сприяє закріпленню, поглибленню й узагальненню теоретичних знань, застосуванню їх до комплексного рішення конкретної задачі по дослідженню й розрахунку механізмів і машин.
1 СТРУКТУРНИЙ АНАЛІЗ МЕХАНІЗМУ КОНВЕЄРА
Механізм конвеєрний зображено на рис. 1, складається з 5 рухомих ланок, а саме: кривошип 1, шатун 2, коромисло 3, повзун 4 та повзун 5. Нерухома ланка - стойка 6.
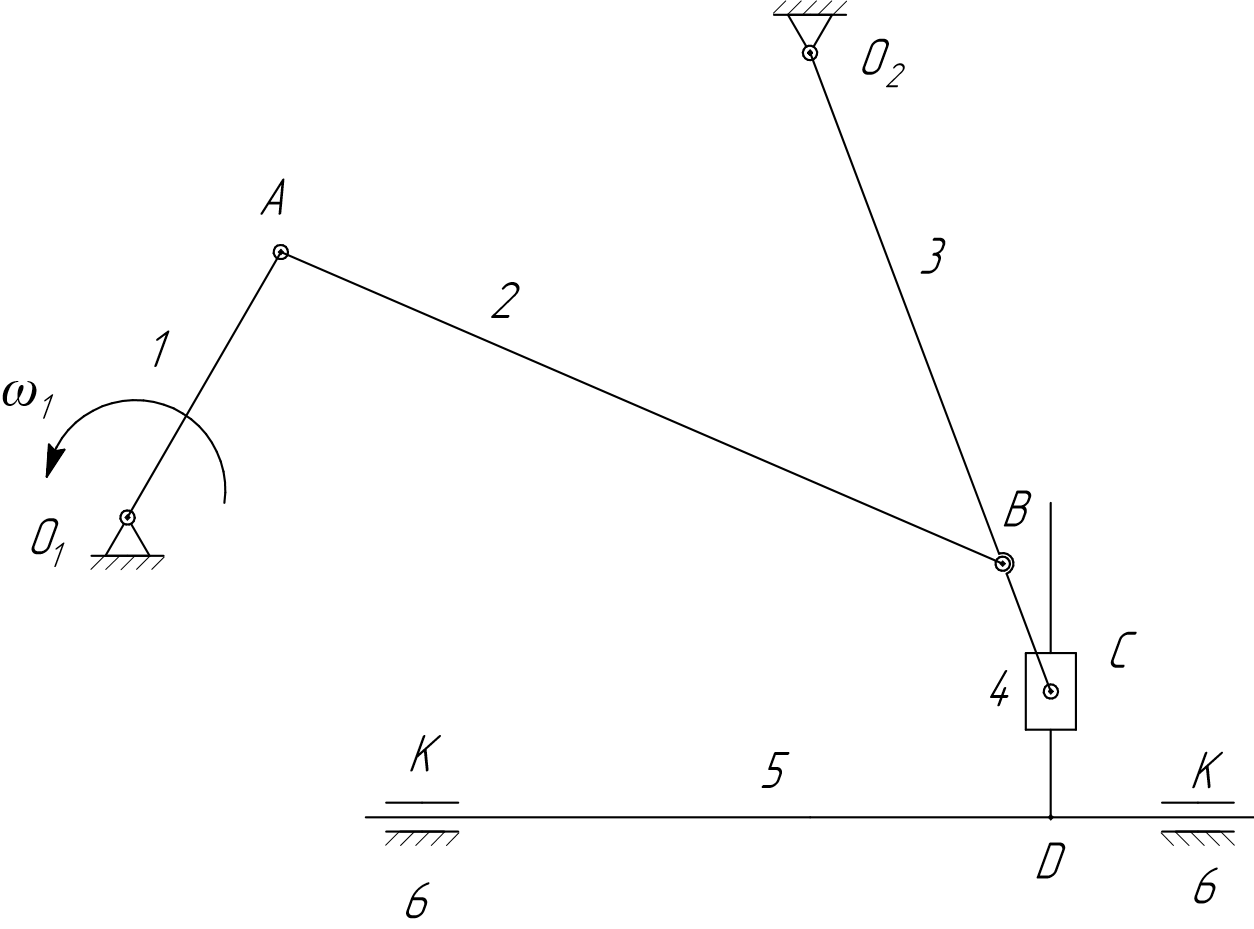
Рисунок 1.1 – Схема механізму конвеєра
Результати аналізу кінематичного ланцюга наведені в таблиці 1.
Таблиця 1 – Характеристика ланок і кінематичних параметрів механізму конвеєра.
| Ланки механізму | Кінематичні пари | |||||
| Позначення | Назва | Характер руху | Позначення | Назва | Ланки що ств. пару | Клас |
| 11 | кривошип | обертальний | | обертальна | 1-6 | 5 |
| 22 | шатун | плоско-паралельний | | обертальна | 1-2 | 5 |
| 33 | коромисло | обертально- поступальний | | обертальна | 2-3 | 5 |
| 44 | повзун | поступальний | C | поступальна | 3-4 | 5 |
| 55 | повзун | поступальний | O | обертальна | 3-6 | 5 |
| 66 | стойка | нерухома | K | поступальна | 5-6 | 5 |
| - | - | - | D | поступальна | 4-5 | 5 |
Визначимо ступінь рухомості механізму за формулою Чебишева (1.1):
 , (1.1)
, (1.1)де, n – число рухомих ланок;
p5 – кількість кінематичних пар 5-го класу;
p4 – кількість кінематичних пар 4-го класу.

Так як W=1, то механізм має одну вхідну ланку. Вхідна ланка зі стійкою складають початковий механізм, таким чином заданий механізм конвеєра має наступну структуру:
Рисунок 1.2 – Початковий механізм
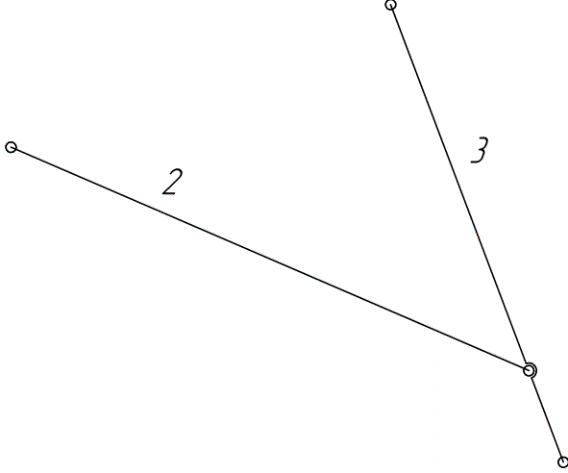
Рисунок 1.3 – група Ассура Ⅱ – класу, Ⅱ – порядку
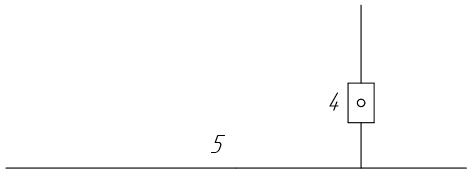
Рисунок 1.4 – група Ассура Ⅱ – класу, Ⅱ – порядку;
Структурна формула:
Ⅰ(1,6) → Ⅱ(2,3)→Ⅱ(4,5)
2 СИНТЕЗ КІНЕМАТИЧНОЇ СХЕМИ КОНВЕЄРА
Склали кінематичну схему механізму конвеєра – до складу механізму, схема якого виконана в масштабі: µl= 0,4 м/мм входять кривошип 1, шатун 2, коромисло 3, повзуни 4, 5 і стояк 6. Механізм зображено в трьох положеннях:
0 – початкове положення, що відповідає початковому робочому ходу повзуна 5 і повороту кривошипа 1 в межах кута φрх робочого ходу;
1 – розгорнутого робоче положення механізму;
2 – друге крайнє положення, що відповідає закінченню робочого ходу повзуна 5 і початку повороту кривошипа 1 в межах кута φхххолостого ходу.
Визначення кута перекриття θ за умови рівномірного обертання кривошипа 1 і додаткового переміщення Н повзуна 5 в обох напрямках співвідношення його середніх швидкостей:
На протязі часу робочого та холостого ходів визначається коефіцієнтом (1.2):
Звідси кут перекриття θ між двома крайніми положеннями кривошипа 1 і шатуна 2 становлять (1.3):

Постійність значення θ і К можна забезпечити, якщо центр О1 обертання кривошипа 1 розміщувати в будь-якій точці кола L, відносно якого пряма В0В2 є хордою, на неї спирається вписаний в коло кут θ. Центр О3 кола L розташований на відрізку В/О3, він є перпендикуляром до хорди В0В2 і проходить через її середню В/, тож радіус кола (1.4):

Якщо положення осі О1 обертання кривошипа 1 зафіксувати центра розміром L1=l3=400 мм, то із
 слід, по – перше:
слід, по – перше:О1В0=О1А0+А0В0=l1+l2
О1В22А2В2 – О1А2=l2 – l1 (1.5)
Рисунок 2.1 - Кінематична схема положення
а по – друге:
На підставі системи рівнянь маємо:
О1В0 – О1В2=l1+l2 – l2+l1=2l1,
Тому,
l2=O1B0 – l1
Для визначення довжини відрізків О1В0 і О1В2 за допомогою системи рівнянь послідовно знайдемо:





Тепер маємо:


Визначаємо довжини кривошипа 1 і шатуна 2 на підставі рівнянь (2.3), отримаємо:


Для подальших розрахунків приймаємо l1=
 мм; l2 =
мм; l2 =  мм.
мм.Визначення координат L1, L2 осі О2 повороту 3, зазначені координати необхідні для обробки отворів корпуса механізму конвеєра на горизонтально- розточувальному верстаті і визначають собою міжосьову відстань:
 (1.7)
(1.7)Абсциса L1=400 мм визначена раніше, ордината осі О2 відносна центра О1 обертання кривошипа:
 (2.5)
(2.5)Приймаємо L2= 371,1 мм.
Конструктивний розмір L3 визначається за емпіричним співвідношенням:

Приймаємо L3=34 мм.
3 КІНЕМАТИЧНЕ ДОСЛІДЖЕННЯ МЕХАНІЗМУ КОНВЕЄРА
3.1 План положень механізму конвеєра
Побудова плану положень механізму конвеєра. Виконані з використанням масштабу
 і визначаються додатковою цифрою у складі індексу кута
і визначаються додатковою цифрою у складі індексу кута  установки кривошипа 1:
установки кривошипа 1:0 – початкове положення з кутом установки
 кривошипа 1, що відповідає початку прямого ходу повзуна 5;
кривошипа 1, що відповідає початку прямого ходу повзуна 5;1 – досліджуване розгорнуте положення механізму з кутом установки кривошипа
 .
.2 – друге крайнє положення, що відповідає значенню прямого ходу повзуна 5 і кута
 установки кривошипа 1.
установки кривошипа 1.Значення кутів установки кривошипа 1 в крайніх положеннях та його повороту в межах прямого
 і зворотного
і зворотного  ходів повзуна 5 становлять відповідно:
ходів повзуна 5 становлять відповідно:





3.2 Визначення швидкостей структурних груп у складі механізму конвеєра
Побудова плану швидкостей механізму конвеєра при
з цієї метою слід визначити окружну швидкість пальця  кривошипа:
кривошипа:
Обрати масштаб плану швидкостей
 і знайти довжину вектора
і знайти довжину вектора  на кресленні:
на кресленні:
Для визначення швидкості точки
 , що належить шатуну 2 і коромислу 3, використаємо векторне рівняння:
, що належить шатуну 2 і коромислу 3, використаємо векторне рівняння:  .
.На підставі якого можна побудувати план швидкостей ланок 1, 2, 3 механізму, оскільки напрямки всіх векторів відомі -
 результатами побудови отримаємо абсолютні швидкості:
результатами побудови отримаємо абсолютні швидкості: м/с;
м/с; м/с.
м/с.