
Ім'я файлу: Опір матеріалів.docx
Розширення: docx
Розмір: 73кб.
Дата: 08.04.2020
скачати
Пов'язані файли:
Лекція 8.pdf
глотка презентація.pptx
Реферат.doc
Розширення: docx
Розмір: 73кб.
Дата: 08.04.2020
скачати
Пов'язані файли:
Лекція 8.pdf
глотка презентація.pptx
Реферат.doc
МІНЕСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ
НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ УКРАЇНИ
”КИЇВСЬКИЙ ПОЛІТЕХНІЧНИЙ ІНСТИТУТ
ІМЕНІ ІГОРЯ СІКОРСЬКОГО”
РЕФЕРАТ
На тему: “Потенціальна енергія при згині.Теоремма Бетті”
Розробив : Новак Я.С
Прийняв : Архипов О.Г
Київ 2020
Потенційна енергія деформації при згині
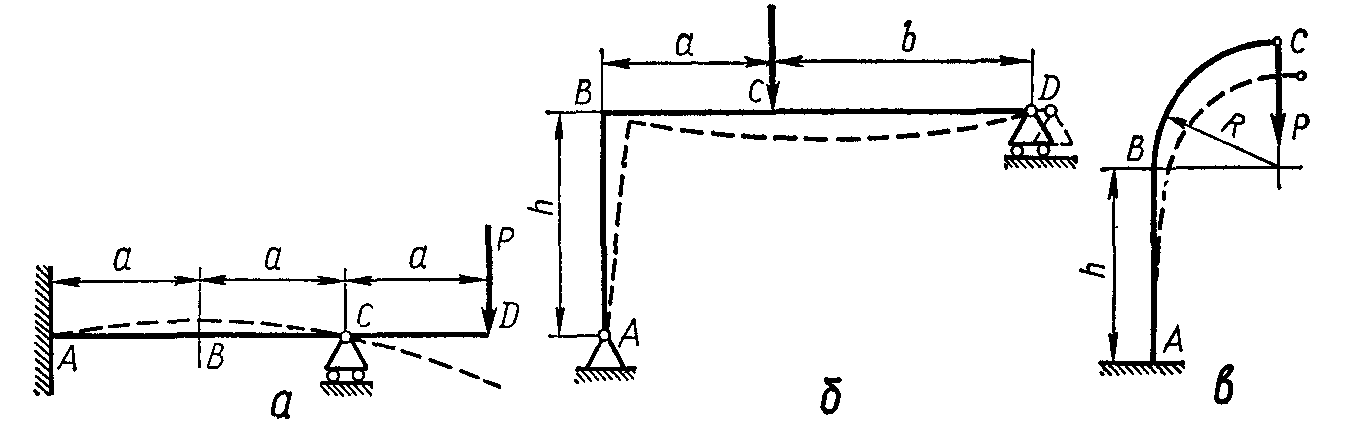
Існує більш загальний метод, заснований на застосуванні закону збереження енергії і придатний для визначення деформацій будь-яких пружних конструкцій (систем). Під пружною системою будемо розуміти систему стрижнів, чи шарнірнірів жорстко зв'язаних між собою (мал. 1).
При статичній дії навантажень відбувається перетворення потенційної енергії з одного виду в іншій. Повне перетворення енергії з одного виду в іншій має місце тільки тоді, коли деформація відбувається без порушення рівноваги системи. Закон збереження енергії при деформації пружних систем приймає вид:
 (1*)
(1*)Рівність (1*) показує, що при переміщеннях без порушення рівноваги сума робіт усіх сил, прикладених до крапок тіла, дорівнює нулю і що потенційна енергія деформації U численно дорівнює роботі зовнішніх сил Ар, проробленої ними при цій деформації.
 (мал.1.1)
(мал.1.1)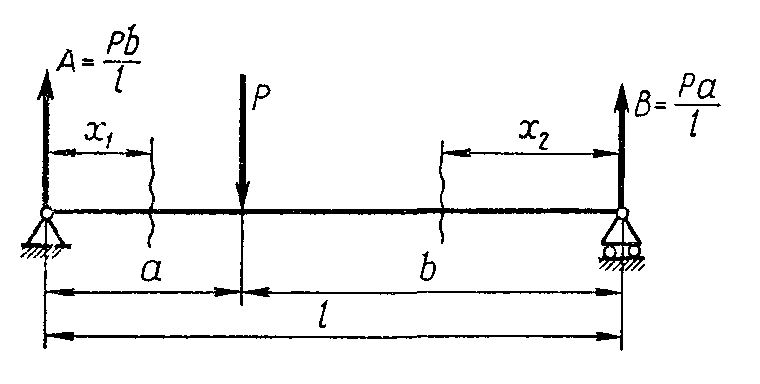
(мал 1.2)
При обчисленні потенційної енергії будемо припускати, що деформації пропорційні навантаженням і ростуть постійно разом з ними. Аналогічно, як і при розтяганні, зрушенні, крутінні, обчислимо потенційну енергію при чистому вигині.
Тобто потенційна енергія деформації дорівнює половині добутку сили (розтягання, зрушення) чи пари сил (крутіння, вигин) на переміщення крапки додатка цієї сили по напрямку сили. Умовимося називати терміном «узагальнена сила» усяке навантаження, яке викликає відповідне навантаженню переміщення, тобто зосереджену силу чи пару сил; переміщення, що відповідає цій силі, будемо називати «узагальненою координатою». Тоді формула для потенційної анергії при різних видах деформації узагальнюється.
де Р — узагальнена сила; δ — узагальнена координата.
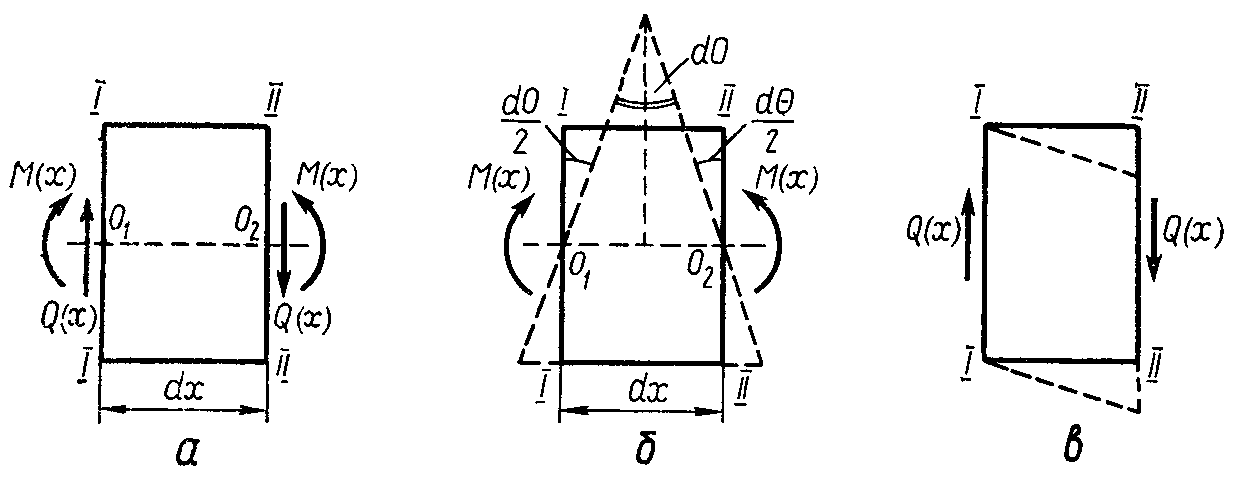
У загальному випадку вигину згинальний момент М (х) — значення перемінне. У будь-якому перетині йому буде супроводжувати поперечна сила Q (х) Тому розглядати випливає не всю балку в цілому, а лише нескінченно малий елемент балки довжиною dx При дії згинаючих зусиль перетину елемента повертаються й утворять між собою кут ð (мал. 1.1). Дотичні зусилля прагнуть викликати перекіс елемента. Звичайно робота дотичних зусиль виявляється малої в порівнянні з роботою нормальних зусиль, тому нею зневажаємо. Елементарна ж робота нормальних зусиль дорівнює

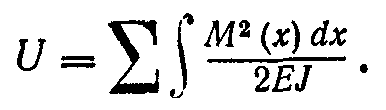
Уся потенційна енергія виходить підсумовуванням по довжині балки.

У тих випадках, коли маємо дві і більш ділянки для М (х), інтеграл розбиваємо на суму інтегралів.
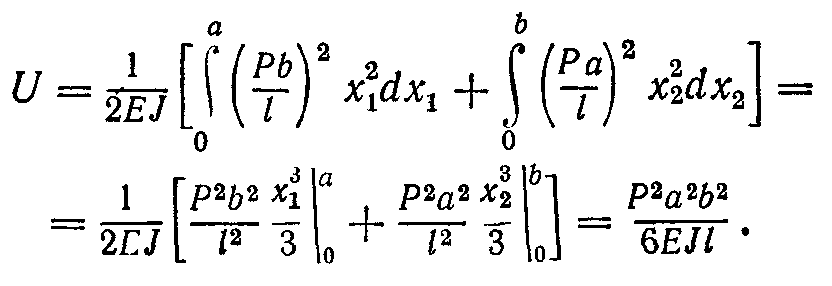
Як приклад розглянемо балку на двох опорах (мал. 1.2) із зосередженою силою. Обчислимо за допомогою потенційної енергії прогин під силою Р. Епюра моменту має дві ділянки, тому і потенційну енергію обчислимо по формулі
Де

І тоді
Очевидно що з зовнішніх сил тільки сила Р робить роботу при деформації балки.
одержимо прогин під цією силою
Якщо сила прикладена посередині

, то одержимо вираження прогину
Теорема Бетті-Максвелла
Теорема Бетті, одне з найважливіших енергетичних властивостей лінійно деформованого тіла, що складається в тому, що при впливі на тіло двох незалежних систем сил (стану i і k) робота Wik зовнішніх або внутрішніх сил стану i на віртуальних (можливих) переміщеннях, викликаних дією сил стану k, дорівнює роботі Wki сил стану k на переміщеннях, викликаних дією сил стану i, тобто Wik = Wki. Вперше був сформульований італійським вченим Е. Бетті (Е. Betti 1823-1892). Наслідком є принципи взаємності переміщень і реакцій, що застосовуються в опорі матеріалів та будівельної механіки при розрахунку пружних систем.
Теорема Бетті (теорема про взаємність робіт)
Робота сили першого стану на переміщенні, викликаному силою другого стану, дорівнює роботі сили другого стану на переміщенні, викликаному силою першого стану:
Перший індекс в позначенні переміщень показує точку і напрямок переміщення, другий - причину переміщення.
Доведемо теорему, розглянувши два порядки докладання зусиль.
порядок
навантажити балку силою F1.
Потенційну енергію деформації визначимо як роботу сили F1 на переміщенні Ϭ11:
2. Добавим силу F2.
Приріст потенційної енергії деформації визначимо як суму робіт сили F2 на переміщенні Ϭ22 і сили F1 на переміщенні Ϭ12:
порядок
1.навантажити балку силою F2.
Потенційну енергію деформації визначимо як роботу сили F2 на переміщенні Ϭ22:
2. Добавим силу F1.
Приріст потенційної енергії деформації визначимо як суму робіт сили F1 на переміщенні Ϭ11 і сили F2 на переміщенні Ϭ21:
Припускаючи, що від порядку докладання зусиль потенційна енергія деформації не залежить, прирівняємо потенційні енергії деформації отримані при першому і другому порядку докладання зусиль F1 і F2:
звідки F1δ12=F2δ21, що і треба було довести.