
Міністерство освіти і науки України
Національний транспортний університет
РЕФЕРАТ
з дисципліни
« ОРГАНІЗАЦІЯ КОМП'ЮТЕРНИХ МЕРЕЖ»
на тему
« Маршрутизатори: призначення, основні особливості організації роботи»
| Виконав: Студент групи ПР 4-1 Шумейко Р.Ю. |
| |
| Перевірив: д. Зайцев Є.О. |
| |
Київ – 2019
ВСТУП 3
Розділ 1. ОСНОВИ МАРШРУТИЗАЦІЇ 4
1.1 Бібліографічна довідка 4
1.2 Компоненти маршрутизації 4
1.2.1 Визначення маршруту 5
1.2.2 Комутація 6
1.3 Алгоритм маршрутизації 9
1.3.1 Мети розробки алгоритмів маршрутизації 9
1.3.2 Типи алгоритмів 11
Розділ 2 Огляд протоколів маршрутизації 16
2.1 Основні протоколи 16
2.2 Технологія інжинірингу трафіка 21
2.2.1 Методи інжинірингу трафіка. 23
ВИСНОВКИ 28
ПЕРЕЛІК ВИКОРИСТАНИХ ДЖЕРЕЛ 29
29
ВСТУП
Необхідність маршрутизація виникає в наступному випадку. Із збільшенням кількості вузлів у мережі ефективність роботи останньої поступово знижується. Це виникає за рахунок збільшення кількості широкомовних повідомлень якими обмінюються вузли мережі. В кінцевому випадку мережа буде працювати сама на себе передаючи тільки широкомовні повідомлення. Одним з виходів із даної ситуації є обмеження простору для широкомовних повідомлень шляхом розбиття великої мережі на більш малі підмережі. Але в такому випадку необхідно використовувати механізми, які б дозволили вузлам однієї підмережі взаємодіяти з вузлами іншої мережі. Це досягається використанням маршрутизаторів, які виконують маршрутизацію, процес передачі пакетів між підмережами, що входять до великої складеної мережі. Розрізняють пряму маршрутизацію і непряму маршрутизацію. Пряма маршрутизація здійснюється між вузлами однієї підмережі. Непряма маршрутизація, це передача дейтаграм між вузлами різних підмереж.
Маршрутизатор являє собою пристрій, що має один або кілька мережних інтерфейсів для підключення локальних мереж або віддалених з’єднань. Кожному фізичному інтерфейсу ставиться у відповідність одна чи кілька ІР-підмереж, що мають з ним безпосередній зв’язок. Маршрутизатор виконує міжмережну передачі пакетів між вузлами доступних йому підмереж. До однієї з функцій маршрутизатора входить зменшення полю TTL (Time tо Live, час життя) на одиницю при приході пакету, а потім кожну секунду його перебування в маршрутизаторі.
У своїй роботі маршрутизатор використовує таблицю маршрутизації, в якій міститься інформація про ІР-адреси і маски підмереж, підключених до його портів мереж, а також список сусідніх маршрутизаторів.
Особливим маршрутом, що має бути присутнім в будь якій таблиці маршрутизації є «Маршрут за замовчуванням», він також може мати назви «Основний шлюз», «Основний маршрут».
Розділ 1. ОСНОВИ МАРШРУТИЗАЦІЇ
1.1 Бібліографічна довідка
У загальнодоступному значенні слова маршрутизація означає пересування інформації від джерела до пункту призначення через об'единенную мережу. При цьому, як правило, на шляху зустрічається принаймні один вузол. Маршрутизація часто протиставляється об'единению мереж за допомогою моста, що, у популярному розумінні цього способу, виконує точно такої ж функції. Основне розходження між ними полягає в тім, що об'єднання за допомогою моста має місце на Рівні 2 еталонні моделі ISO, у той час як маршрутизація зустрічається на Рівні 3. Цією різницею об'ясняется те, що маршрутизація й об'єднання за мостовою схемою використовують різну інформацію в процесі її переміщення від джерела до місця призначення. Результатом цього є те, що маршрутизація й об'єднання за допомогою моста виконують свої задачі різними способами; фактично, мається кілька різних видів маршрутизації й об'единения за допомогою мостів. Додаткова інформація про об'единении мереж за допомогою мостів приведена в Главі "Основи Об'единения мереж за допомогою мостів".
Тема маршрутизації висвітлювалася в науковій літературі про комп'ютери більш 2-х десятиліть, однак з комерційної точки зору маршрутизація придбала популярність тільки в 1970 р. Протягом цього періоду мережі були досить простими, гомогенними оточеннями. Великомасштабне об'єднання мереж стало популярно тільки останнім часом.
1.2 Компоненти маршрутизації
Маршрутизація містить у собі два основних компоненти: визначення оптимальних трактів маршрутизації і транспортування информационых груп (звичайно називаних пакетами) через об'единенную мережу. У дійсній роботі останній з цих двох компонентів називається комутацією. Комутація відносно проста. З іншого боку, визначення маршруту може бути дуже складним процесом.
1.2.1 Визначення маршруту
Визначення маршруту може базуватися на різних показниках (величинах, що результируют з алгоритмічних обчислень по окремої перемінний - наприклад, довжина маршруту) чи комбінаціях показників. Програмні реалізації алгоритмів маршрутизації вираховують показники маршруту для визначення оптимальних маршрутів до пункту призначення.
Для полегшення процесу визначення маршруту, алгоритми маршрутизації инициализируют і підтримують таблиці маршрутизації, у яких міститься маршрутна інформація. Маршрутна інформація змінюється в залежності від використовуваного алгоритму маршрутизації.
Алгоритми маршрутизації заповнюють маршрутні таблиці деякою безліччю інформації. Асоціації "Пункт призначення/наступна пересилання" повідомляють роутеру, що визначений пункт призначення може бути оптимально досягнуть шляхом відправлення пакета у визначений роутер, що представляє "наступну пересилання" на шляху до кінцевого пункту призначення. При прийомі пакета, що надходить, роутер перевіряє адреса пункту призначення і намагається асоціювати ця адреса з наступною пересиланням. На рис. 1.2.1.1 приведений приклад маршрутної таблиці "місце призначення/наступна пересилання".
| To reach network: | Send to: |
| 27 | Node A |
| 57 | Node B |
| 17 | Node C |
| 24 | Node A |
| 52 | Node A |
| 16 | Node B |
| 26 | Node A |
| . . . | . . . |
Figure Destination/Next Hop Routing Table
У маршрутних таблицях може міститися також і інша інформація. "Показники" забезпечують інформацію про бажаність якого-небудь чи каналу тракту. Роутеры порівнюють показники, щоб визначити оптимальні маршрути. Показники відрізняються друг від друга в залежності від використаної схеми алгоритму маршрутизації. Далі в цій главі буде представлений і описаний ряд загальних показників.
Роутеры повідомляються один з одним (і підтримують свої маршрутні таблиці) шляхом передачі різних повідомлень. Одним з видів таких повідомлень є повідомлення про "відновлення маршрутизації". Відновлення маршрутизації звичайно включають усю маршрутну чи таблицю її частину. Аналізуючи інформацію про відновлення маршрутизації, що надходить від усіх роутеров, кожної з них може побудувати детальну картину топології мережі. Іншим прикладом повідомлень, якими обмінюються роутеры, є "оголошення про стан каналу". Оголошення про стан каналу інформує інші роутеры про стан каналів відправника. Канальна інформація також може бути використана для побудови повної картини топології мережі. Після того, як топологія мережі стає зрозумілої, роутеры можуть визначити оптимальні маршрути до пунктів призначення.
1.2.2 Комутація
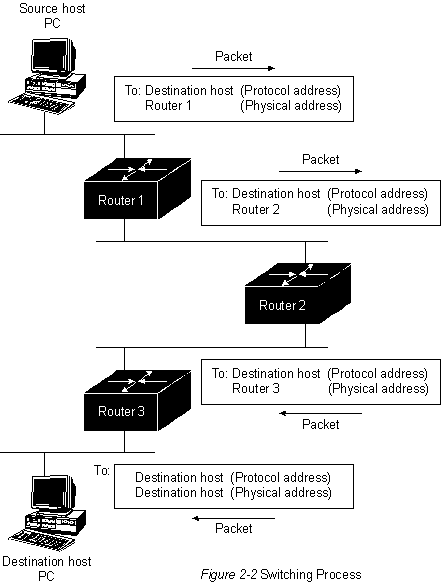
Алгоритми комутації порівняно прості й в основному однакові для більшості протоколів маршрутизації. У більшості випадків головна обчислювальна машина визначає необхідність відправлення пакета в іншу головну обчислювальну машину. Одержавши визначеним способом адреса роутера, головна обчислювальна машина-джерело відправляє пакет, адресований спеціально у фізичну адресу роутера (рівень МАС), однак з адресою протоколу (мережний рівень) головної обчислювальної машини пункту призначення.
Після перевірки адреси протоколу пункту призначення пакета роутер визначає, знає він чи ні, як передати цей пакет до наступного роутеру. В другому випадку (коли роутер не знає, як переслати пакет) пакет, як правило, ігнорується. У першому випадку роутер відсилає пакет до наступного роутеру шляхом заміни фізичної адреси пункту призначення на фізичну адресу наступного роутера і наступної передачі пакета.
Наступна пересилання може чи бути не бути головною обчислювальною машиною остаточного пункту призначення. Якщо ні, то наступною пересиланням, як правило, є інший роутер, що виконує такий же процес ухвалення рішення про комутацію. У міру того, як пакет просувається через об'єднану мережу, його фізична адреса міняється, однак адреса протоколу залишається незмінним. Цей процес ілюструється на Рис. 1.2.2.1
У викладеному вище описі розглянута комутація між джерелом і системою кінцевого пункту призначення. Міжнародна Організація по Стандартизації (ISO) розробила ієрархічну термінологію, що може бути корисної при описі цього процесу. Якщо користатися цією термінологією, то пристрою мережі, що не володіють здатністю пересилати пакети між подсетями, називаються кінцевими системами (ЕS), у той час як пристрою мережі, що мають таку здатність, називаються проміжними системами (IS). Проміжні системи далі підрозділяються на системи, що можуть повідомлятися в межах "доменов маршрутизації" ("внутрідоменні" IS), і системи, що можуть повідомлятися як у межах домена маршрутизації, так і з іншими доменами маршрутизації ("междоменные IS"). Звичайно вважається, що "домен маршрутизації" - це частина об'єднаної мережі, що знаходиться під загальним адміністративним керуванням і регульованої преділеним набором адміністративних керівних принципів. Домены маршрутизації називаються також "автономними системами" (AS). Для опрелеленных протоколів домены маршрутизації можуть бути додатково підрозділені на "ділянки маршрутизації", однак для комутації як усередині ділянок, так і між ними також використовуються внутрідоменні протоколи маршрутизації.
1.3 Алгоритм маршрутизації
Алгоритми маршрутизації можна диференціювати, ґрунтуючись на декількох ключових характеристиках. По-перше, на роботу результуючого протоколу маршрутизації впливають конкретні задачі, що вирішує розроблювач алгоритму. По-друге, існують різні типи алгоритмів маршрутизації, і кожний з них по-різному впливає на мережу і ресурси маршрутизації. І нарешті, алгоритми маршрутизації використовують різноманітні показники, що впливають на розрахунок оптимальних маршрутів. У наступних розділах аналізуються ці атрибути алгоритмів маршрутизації.
1.3.1 Мети розробки алгоритмів маршрутизації
При розробці алгоритмів маршрутизації часто переслідують одну чи трохи з перерахованих нижче цілей:
Оптимальність
Простота і низькі непродуктивні витрати
Живучість і стабільність
Швидка збіжність
Гнучкість
Оптимальність
Оптимальність, імовірно, є самою загальною метою розробки. Вона характеризує здатність алгоритму маршрутизації вибирати "найкращий" маршрут. Найкращий маршрут залежить від показників і від "ваги" цих показників, використовуваних при проведенні розрахунку. Наприклад, алгоритм маршрутизації міг би використовувати кілька пересилань з визначеною затримкою, але при розрахунку "вага" затримки може бути їм оцінений як дуже значний. Природно, що протоколи маршрутизації дожны строго визначати свої алгоритми розрахунку показників.
Простота і низькі непродуктивні витрати
Алгоритми маршрутизації розробляються як можна більш простими. Іншими словами, алгоритм маршрутизації повинний ефективно забезпечувати свої функціональні можливості, з мінімальними витратами програмного забезпечення і коефіцієнтом використання. Особливо важлива ефективність у тому випадку, коли програма, що реалізує алгоритм маршрутизації, повинна працювати в комп'ютері з обмеженими фізичними ресурсами.
Живучість і стабільність
Алгоритми маршрутизації повинні мати живучість. Іншими словами, вони повинні чітко функціонувати у випадку неординарних чи непередбачених обставин, таких як відмовлення апаратури, умови високого навантаження і некоректні реалізації. Т.к. роутеры розташовані у вузлових крапках мережі, їхнє відмовлення може викликати значні проблеми.
Часто найкращими алгоритмами маршрутизації виявляються ті, котрі витримали іспит часом і довели свою надійність у різних умовах роботи мережі.
Швидка збіжність
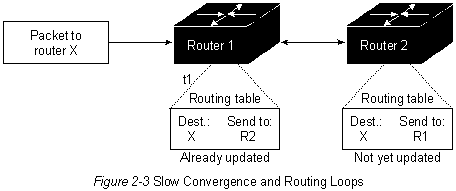
Алгоритми маршрутизації повинні швидко сходитися. Збіжність - це процес угоди між усіма роутерами по оптимальних маршрутах. Коли яка-небудь подія в мережі приводить до того, що чи маршрути відкидаються, чи стають доступними, роутеры розсилають повідомлення про відновлення маршрутизації. Повідомлення про відновлення маршрутизації пронизують мережі, стимулюючи перерахування оптимальних маршрутів і, в остаточному підсумку, змушуючи всі роутеры прийти до угоди по цих маршрутах. Алгоритми маршрутизації, що сходяться повільно, можуть привести до утворення петель чи маршрутизації виходам з ладу мережі.
На Рис. 1.3.1.1 зображена петля маршрутизації. У даному випадку, у момент часу t1 до роутеру 1 прибуває пакет. Роутер 1 уже був обновлений і тому він знає, що оптимальний маршрут до пункту призначення вимагає, щоб наступною зупинкою був роутер 2.
Тому роутер 2 пересилає пакет назад у роутер 1. Пакет буде продовжувати скакати взад і вперед між двома роутерами доти, поки роутер 2 не одержить коректування маршрутизації, чи поки число комутацій даного пакета не перевищить припустимого максимального числа.
Гнучкість
Алгоритми маршрутизації повинні бути також гнучкими. Іншими словами, алгоритми маршрутизації повинні швидко і точно адаптуватися до різноманітних обставин у мережі. Наприклад, припустимо, що сегмент мережі відкинуть. Багато алгоритмів маршрутизації, після того як вони довідаються про цю проблему, швидко вибирають наступний найкращий шлях для всіх маршрутів, що звичайно використовують цей сегмент. Алгоритми маршрутизації можуть бути запрограмовані таким чином, щоб вони могли адаптуватися до змін смуги пропущення мережі, розмірів черги до роутеру, величини затримки мережі й інших перемінних.
1.3.2 Типи алгоритмів
Алгоритми маршрутизації можуть бути класифіковані по типах. Наприклад, алгоритми можуть бути:
Статичними чи динамічними
Одномаршрутними чи многомаршрутными
Одноуровневыми чи ієрархічними
З інтелектом у головній обчислювальній чи машині в роутере
Внутрідоменними і междоменными
Алгоритмами стану чи каналу вектора відстаней
Статичні чи динамічні алгоритми
Статичні алгоритми маршрутизації взагалі навряд чи є алгоритмами. Розподіл статичних таблиць маршрутизації встановлюється адміністратором мережі до початку маршрутизації. Воно не міняється, якщо тільки адміністратор мережі не змінить його. Алгоритми, що використовують статичні маршрути, прості для розробки і добре працюють в оточеннях, де трафик мережі відносно передбачуваний, а схема мережі відносно проста.
Т.к. статичні системи маршрутизації не можуть реагувати на зміни в мережі, вони, як правило, вважаються непридатними для сучасних великих, що постійно змінюються мереж. Більшість домінуючих алгоритмів маршрутизації 1990р. - динамічні.
Динамічні алгоритми маршрутизації підбудовуються до обставин мережі, що змінюються, у масштабі реального часу. Вони виконують це шляхом аналізу повідомлень, що надходять, про відновлення маршрутизації. Якщо в повідомленні вказується, що мало місце зміна мережі, програми маршрутизації перераховують маршрути і розсилають нові повідомлення про коректування маршрутизації. Такі повідомлення пронизують мережа, стимулюючи роутеры заново проганяти свої алгоритми і відповідним чином змінювати таблиці маршрутизації. Динамічні алгоритми маршрутизації можуть доповнювати статичні маршрути там, де це доречно. Наприклад, можна розробити "роутер останнього звертання" (тобто роутер, у який відсилаються всі не відправлені по визначеному маршруті пакети). Такий роутер виконує роль сховища не відправлених пакетів, гарантуючи, що всі повідомлення будуть хоча б певним чином оброблені.
Одномаршрутні чи многомаршрутные алгоритми
Деякі складні протоколи маршрутизації забезпечують безліч маршрутів до тому самому пункту призначення. Такі многомаршрутные алгоритми уможливлюють мультиплексную передачу трафика по численних лініях; одномаршрутні алгоритми не можуть робити цього. Переваги многомаршрутных алгоритмів очевидні - вони можуть забезпечити заначительно велику пропускну здатність і надійність.
Одноуровневые чи ієрархічні алгоритми
Деякі алгоритми маршрутизації оперують у плоскому просторі, у те час як інші використовують ієрархії маршрутизації. В одноуровневой системі маршрутизації всі роутеры рівні по відношенню друг до друга. В ієрархічній системі маршрутизації деякі роутеры формують те, що складає основу (backbone - базу) маршрутизації. Пакети з небазових роутеров переміщаються до базовыи роутерам і пропускаються через них доти, поки не досягнуть загальної області пункту призначення. Починаючи з цього моменту, вони переміщаються від останнього базового роутера через один чи трохи небазових роутеров до кінцевого пункту призначення.
Системи маршрутизації часто встановлюють логічні групи вузлів, називаних доменами, чи автономними системами (AS), чи областями. В ієрархічних системах одні роутеры якого-небудь домена можуть повідомлятися з роутерами інших доменов, у той час як інші роутеры цього домена можуть підтримувати зв'язок з роутеры тільки в межах свого домена. У дуже великих мережах можуть існувати додаткові ієрархічні рівні. Роутеры найвищого ієрархічного рівня утворять базу маршрутизації.
Основною перевагою ієрархічної маршрутизації є те, що вона імітує організацію більшості компаній і отже, дуже добре підтримує їхньої схеми трафика. Велика частина мережного зв'язку має місце в межах груп невеликих компаній (доменов). Внутрідоменним роутерам необхідно знати тільки про інших роутерах у межах свого домена, тому їхні алгоритми маршрутизації можуть бути спрощеними. Відповідно може бути зменшений і трафик відновлення маршрутизації, що залежить від використовуваного алгоритму маршрутизації.
Алгоритми з інтелектом у головній обчислювальній чи машині в роутере
Деякі алгоритми маршрутизації припускають, що кінцевий вузол джерела визначає весь маршрут. Звичайно це називають маршрутизацією від джерела. У системах маршрутизації від джерела роутеры діють просто як пристрою збереження і пересилання пакета, без усякий роздумів відсилаючи його до наступного зупинці.
Інші алгоритми припускають, що головні обчислювальні машини нічого не знають про маршрути. При використанні цих алгоритмів роутеры визначають маршрут через об'єднану мережу, базуючи на своїх власних розрахунках. У першій системі, розглянутої вище, інтелект маршрутизації знаходиться в головній обчислювальній машині. У системі, розглянутої в другому випадку, інтелектом маршрутизації наділені роутеры.
Компроміс між маршрутизацією з інтелектом у головній обчислювальній машині і маршрутизацією з інтелектом у роутере досягається шляхом зіставлення оптимальності маршруту з непродуктивними витратами трафика. Системи з інтелектом у головній обчислювальній машині частіше вибирають найкращі маршрути, тому що вони, як правило, знаходять усі можливі маршрути до пункту призначення, перш ніж пакет буде дійсно відісланий. Потім вони вибирають найкращий маршрут, ґрунтуючись на визначенні оптимальності даної конкретної системи. Однак акт визначення всіх маршрутів часто вимагає значного трафика пошуку і великого об'ема часу.
Внутрідоменні чи междоменные алгоритми
Деякі алгоритми маршрутизації діють тільки в межах доменов; інші - як у межах доменов, так і між ними. Природа цих двох типів алгоритмів різна. Тому зрозуміло, що оптимальний алгоритм внутрідоменної маршрутизації не обов'язково буде оптимальним алгоритмом междоменной маршрутизації.
Алгоритми стану чи каналу вектора відстані
Алгоритми стану каналу (відомі також як алгоритми "першочерговості найкоротшого маршруту") направляють потоки маршрутної інформації в усі вузли об'єднаної мережі. Однак кожен роутер посилає тільки ту частину маршрутної таблиці, що описує стан його власних каналів. Алгоритми вектора відстані ( відомі також як алгоритми Бэлмана-Форда) жадають від кожного роутера посилки всієї чи частини своєї маршрутної таблиці, але тільки своїм сусідам. Алгоритми стану каналів фактично направляють невеликі коректування в усіх напрямках, у той час як алгоритми вектора відстаней відсилають більш великі коректування тільки в сусідні роутеры.
Відрізняючи більш швидкою збіжністю, алгоритми стану каналів трохи менше схильні до утворення петель маршрутизації, чим алгоритми вектора відстані. З іншого боку, алгоритми стану каналу характеризуються більш складними розрахунками в порівнянні з алгоритмами вектора відстаней, вимагаючи більшій процесорній потужності і пам'яті, чим алгоритми вектора відстаней. Унаслідок цього, реалізація і підтримка алгоритмів стану каналу може бути більш дорогої. Незважаючи на їхні розходження, обидва типи алгоритмів добре функціонують при всіляких обставинах.
Розділ 2 Огляд протоколів маршрутизації
2.1 Основні протоколи
Протокол RIP. RIP (Routing Information Protocol) — один з перших протоколів внутрішньої маршрутизації, що застосовувалися в Інтернеті (1982 р.). Перша версія протоколу RIP описана в специфікації RFC 1058, а друга (RIP ver. 2) — в специфікації RFC 2453. В цьому протоколі метрикою є кількість пересилань між вузлами (hops). Ця метрика не забезпечує облік пропускної здатності, надійності та завантаженості трактів передачі, а також характеристик трафіка користувачів.
RIP — це протокол дистанційно-векторної маршрутизації, що ґрунтується на використанні вектора відстаней (Distance Vector). Він не дозволяє забезпечити функціонування широкомасштабних мереж через обмеженість числа пересилань (hops) до 15. Для пошуку шляху використовується алгоритм Беллмана — Форда. Цей протокол застосовувався для перших маршрутизаторів Інтернету, побудованих на міні-ЕОМ типу Honeywell 516 (8-розрядні мікропроцесори типу Intel 8080 або Zilog Z80).
Робота протоколу RIP заснована на широкомовному розсиланні повідомлень про коректування маршрутів. Періодичність розсилання оновлень — 30 с. Розсилаються повні копії таблиць маршрутизації незалежно від того, змінені вони чи ні. RIP схильний до утворення петель у розрахованих маршрутах. У RIPv2 допускається балансування навантаження на шляхах з рівною «довжиною» (вартістю).
Протоколи IGRP/EIGRP. Протокол IGRP (Interior Gateway Routing Protocol) і його розширена версія EIGRP (Enhanced Interior Gateway Routing Protocol) розроблені в корпорації Cisco. І якщо протокол IGRP — це дистанційно-векторний протокол, то EIGRP — протокол змішаного типу.
Протокол IGRP розроблений у середині 1980-х рр. і заснований на широкомовному розсиланні повідомлень із подальшим використанням періодичних таймерів (90 с). Розсилаються повні копії своїх маршрутних таблиць. У цьому протоколі використовується комбінована метрика, заснована на обліку пропускної здатності каналу, часової затримки, надійності каналу і його завантаженості. Протокол ІGRP підтримує до 255 пересилань.
Балансування навантаження в протоколі ІGRP може здійснюватися на шляхах з однаковою та різною «вартістю». Сам трафік розподіляється по різних шляхах пропорційно їх «вартості». Балансування навантаження на шляхах з однаковою вартістю здійснюється автоматично, а для використання шляхів з різною вартістю необхідна додаткова конфігурація та настроювання обладнання (команди варіантності/розбіжності — varіance).
Протокол EIGRP розроблено на початку 1990-х рр. і є спробою сумістити переваги дистанційно-векторних протоколів і протоколів стану каналів. У ньому залишилися від IGRP без зміни максимальне число пересилань (225) і типи використовуваних метрик. Для усунення петель у маршрутах і оперативному реагуванні на зміни в мережі використовується алгоритм дифузійного оновлення DUAL (Distributed Update Algotithm). EIGRP не використовує періодичні оновлення про стан мережі, а використовує інкрементні оновлення (incremental updates).
Протокол OSPF (Open Shortest Path First) належить до класу протоколів стану каналів (Link State Protocol). Дослівний переклад — першим обирається найкоротший шлях. «Open»-специфікація протоколу вільно поширюється, на відміну, наприклад, від специфікації протоколу EIGRP. RFC 2328 — основний діючий документ по OSPF.
Окрім того, протокол OSPF дозволяє визначити для будь-якої мережі значення метрики залежно від типу послуги TOS (Type of Service). В OSPF підтримуються метрики пропускної здатності та затримки. Метрика, що оцінює пропускну здатність каналу, визначається, наприклад, компанією Cisco, як кількість секунд, необхідних для передачі 100 Мбіт. Метрика затримки — час у мікросекундах, необхідний маршрутизатору для обробки, постановки в чергу та передачі пакетів. Для кожної з метрик протокол OSPF будує окрему таблицю маршрутизації. Стандартний порядок розрахунку метрики, що оцінює показники надійності, затримки й вартості, поки не визначений. Цей порядок визначається адміністратором.
У цьому протоколі також закладено можливість балансування навантаження на шляхах як з однаковою вартістю, так і з різною, розподіл трафіка відбувається пропорційно метриці шляху.
Протокол IS-IS (Intermediate System — to — Intermediate System) є продуктом ISO на базі мережної архітектури DECNet Phase V. Попередником протоколу IS-IS є протокол маршрутизації DPR (DECNet Routing Protocol). У термінології ISO «проміжна система» (intermediate system, IS) — маршрутизатор мережі, а «кінцева система» (end system, ES) — хост.
Існує також протокол ES-IS для організації обміну інформації в ланці «кінцева система» — «проміжна система». IS-IS успішно функціонує в мережах, що містять понад 500 маршрутизаторів. IS-IS — протокол стану каналів (зв’язків).
IS-IS сам по собі не підтримує протокол ІP, тому використовують інтегрований IS-IS (Integrated IS-IS). Протокол IS-IS стандартизовано і в рамках IETF: в RFC 1142 «OSI IS-IS Intra-domain Routing Protocol», а також у RFC 1195 «Use of OSI IS-IS for routing in TCP/IP and dual environments» (використання протоколу IS-IS у мережах TCP/IP і в двопротокольному середовищі).
Основна адитивна метрика протоколу IS-IS — число, яке не перевищує 1024 для маршруту та 64 для окремого каналу. Ця метрика встановлюється адміністратором. Також використовуються такі три типи метрик: затримка (delay); вартість передачі по каналу, що характеризує комунікаційні витрати (expense); помилки (error). IS-IS підтримує можливість задавати в полі QoS пакета співвідношення між цими чотирма метриками.
Протокол EGP. Окрім того, у сучасних мережних технологіях, що підтримують ієрархічні структури маршрутизаторів, виділяються логічні групи вузлів, називані доменами, автономними системами (AS) або областями, у рамках яких реалізуються єдині принципи адміністрування. Для здійснення маршрутизації в межах подібних доменів можуть використовуватися спеціальні протоколи — протоколи внутрішньодоменної маршрутизації. Для організації маршрутизації між різними доменами використовуються протоколи міждоменної маршрутизації. Подібний розподіл характерний для ІP-мереж, у рамках яких за аналогією виділяються протоколи внутрішнього (Interior Gateway Protocols, IGP) та зовнішнього (Exterior Gateway Protocols, EGP) шлюзу. На відміну від IGP-протоколів RIP, IGRP, EIGRP, OSPF, які в IP-мережах використовуються як внутрішньодоменні, протоколи EGP (Exterior Gateway Protocol) та BGP (Border Gateway Protocol) є міждоменними протоколами (рис. 2.1.1).
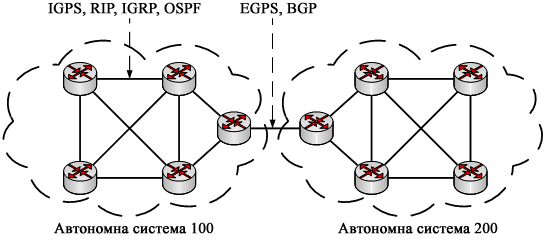
Рис. 2.1.1. Внутрішньодоменна та міждоменна маршрутизація
Протокол EGP описано в RFC 904 (квітень 1984). EGP служить для організації зв’язку між приграничними маршрутизаторами в мережі Інтернет, які, у свою чергу, належать різним автономним системам. Необхідно враховувати, що для зв’язку з маршрутизаторами всередині своєї автономної системи приграничний маршрутизатор, окрім підтримки EGP, також має підтримувати протоколи класу IGP, оскільки всю інформацію про свою автономну систему протокол EGP одержує від IGP-протоколів.
Хоча EGP належить до динамічних протоколів маршрутизації, протокол не використовує метрики. EGP розсилає своїм сусідам оновлену інформацію через регулярні інтервали часу. Ця інформація про всі мережі, до яких маршрутизатор безпосередньо підключений, і є основою побудови таблиць маршрутизації. Маршрутизатор EGP представляє тільки один шлях до кожної мережі. Це унеможливлює використання процедур динамічного балансування навантаження за різними шляхами та окремими трактами передачі.
Протокол BGP. Протокол BGP розроблений компаніями IBM і Cisco. BGP описано в документах RFC-1267, BGP-3; RFC-1268; RFC-1467, RFC 1771 (BGP-4: -1265-66, 1655). Він призначений для забезпечення маршрутизації без зациклень пакетів як між автономними системами, так і в межах однієї подібної системи. Не всі вузли, що використовують протокол BGP, є маршрутизаторами, навіть якщо обмінюються маршрутною інформацією із приграничним маршрутизатором сусідньої автономної системи.
BGP використовує протокол транспортного рівня для передачі службової інформації. Це підвищує надійність, оскільки протоколи транспортного рівня спроектовані для гарантованої доставки інформації. Як транспортний протокол застосовується TCP. Спочатку маршрутизатори, що працюють за протоколом BGP, обмінюються повними таблицями маршрутів, потім розсилаються тільки оновлення при змінах у таблицях. На відміну від інших протоколів, BGP не вимагає періодичного оновлення таблиць маршрутизації, натомість зберігаються останні версії таблиць сусідів. Хоча протокол обслуговує всілякі шляхи в певну мережу, у своїх повідомленнях про оновлення (updates messages) він розсилає інформацію тільки про найкращий шлях.
Протокол BGP здатний виявляти зациклення маршрутизації та має гнучкі можливості визначення стратегії маршрутизації й агрегування маршрутів, тобто логічного об’єднання кількох ІP-мереж в одну «супермережу», що дозволяє значно скорочувати розміри таблиць маршрутизації. Основи агрегування маршрутів в Інтернеті описані в RFC 2519.
Основна мета BGP — маршрутизація транзитного трафіка. Місцевий трафік або починається, або завершується в автономній системі; в іншому випадку це транзитний трафік. Системи без транзитного трафіка не мають потреби в BGP (їм достатньо EGP для спілкування із транзитними вузлами). Зараз BGP поступово витісняє EGP з мережі Інтернет.
Протокол PNNI. Ще одним із протоколів стану каналу є протокол PNNI (Private Network — Network Interface). Слід зазначити, що цей протокол розроблявся для підтримки специфікації QoS в ATM (стандарт RFC 2386). Архітектура АТМ сама по собі є QoS-сумісною, яка підтримує всі метрики, необхідні для забезпечення постійного рівня сервісу маршрутизації. Базовими метриками протоколу PNNI є: адміністративний ваговий коефіцієнт (Administrative Weight, AW) — довільно обирана адміністратором вартість; доступна швидкість передачі чарунок (Available Cell Rate, AvCR) — пропускна здатність лінії; максимальна затримка передачі чарунок (Maximum Cell Transfer Delay, MaxCTD) — затримка передачі чарунок в каналі; відсоток втрат (Cell Loss Ratio, CLR) — середня кількість загублених під час передачі чарунок; розкид затримки (Cell Delay Variation, CDV); підсумкова метрика, яка дорівнює різниці відсотка втрат каналу та відсотка втрат оточення; максимальна швидкість передачі (Maximum Cell Rate, MaxCR), максимальна пропускна здатність каналу. Всі названі метрики можуть призначатися адміністратором або динамічно, або статично. За допомогою цих метрик протокол маршрутизації PNNІ обчислює придатність обраного шляху для доставки чарунок до місця призначення.
2.2 Технологія інжинірингу трафіка
Одним з потужних методів впливу на ефективне використання ресурсів мережі є технологія Traffіc Engіneerіng (TE) або в дослівному перекладі «інжиніринг трафіка». У вузькому значенні, яке найбільше відповідає назві, під TE розуміються методи та механізми досягнення збалансованості завантаження всіх ресурсів мережі за рахунок раціонального вибору шляхів проходження трафіка через мережу. Механізм управління трафіком надає можливість установлювати явний шлях, за яким прямуватимуть потоки даних.
Недоліки існуючих методів управління трафіком. При традиційній маршрутизації, як зазначалося вище, трафік маршрутизується за допомогою передачі його пакетів від джерела до адресата за шляхом, який має найменшу сумарну метрику мережного рівня. Слід зазначити, що відповідно до можливостей сучасних протоколів маршрутизації при наявності в мережі декількох альтернативних маршрутів трафік пропорційно розподіляється між ними, і навантаження на маршрутизатори та канали зв’язку розподіляються більш збалансовано. Проте такий підхід не завжди є доцільним, особливо коли такі маршрути не є повністю рівноцінними, тобто мають різну метрику.
Ще один істотний недолік традиційних методів маршрутизації трафіка в існуючих ТКС полягає в тому, що шляхи обираються без урахування поточного завантаження ресурсів мережі. Якщо найкоротший шлях уже перевантажений, то пакети однаково надсилатимуться саме цим шляхом. Класичним прикладом неефективності такого підходу є так звана «риба» — мережа з топологією, наведеною на рис. 10.4.14. Незважаючи на те, що між вузлами А та Е існує два шляхи (верхній — через комутатор B і нижній — через комутатори С і D), весь трафік від вузла А до вузла Е відповідно до традиційних принципів маршрутизації прямує тільки за верхнім шляхом. Тільки тому, що нижній шлях (на одну ретрансляційну ділянку) довший, ніж верхній, він ігнорується, хоча міг би працювати «паралельно» з верхнім шляхом.
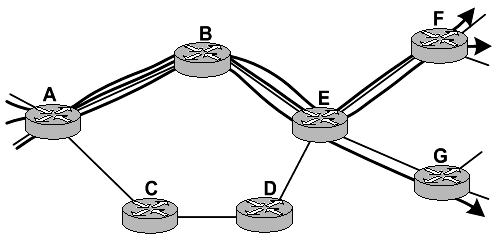
Рис. 10.4.14. Приклад неефективності використання найкоротших шляхів на топології «риба»
У мережі, поданій на рис. 10.4.14, верхній шлях продовжуватиме використовуватися навіть тоді, коли його ресурсів не вистачатиме для обслуговування трафіка від вузла А до вузла Е, а нижній шлях простоюватиме, хоча, можливо, ресурсів вузлів D, С і каналів зв’язку між ними вистачило б для якісної передачі пакетів цього трафіка. Цей приклад, який є типовим для сучасних ТКС, демонструє очевидні недоліки існуючих методів розподілу ресурсів мережі — одні ресурси працюють із перевантаженням, а інші не використовуються зовсім. Традиційні методи боротьби з перевантаженнями цю проблему розв’язати не можуть, тому стали потрібні якісно інші механізми.
2.2.1 Методи інжинірингу трафіка.
Вихідними даними для методів інжинірингу трафіка є:
характеристики транспортної мережі — її топологія, а також продуктивність складових її вузлів і каналів зв’язку (рис. 2.2.1.1);
відомості про запропоноване навантаження мережі, тобто про потоки трафіка, які мережа має передати між своїми приграничними вузлами (рис. 2.2.1.2).
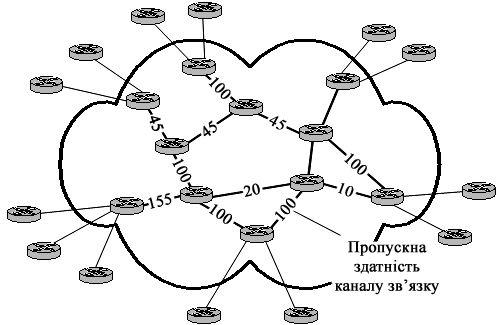
Рис. 2.2.1.1. Топологія мережі та продуктивність її ресурсів
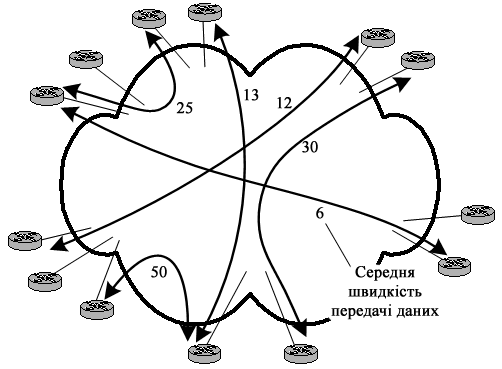
Рис. 2.2.1.2. Запропоноване навантаження на мережу
Нехай продуктивність процесора кожного мережного вузла достатня для обслуговування трафіка всіх його вхідних інтерфейсів, навіть якщо трафік надходить на інтерфейс із максимально можливою швидкістю, що дорівнює пропускній здатності інтерфейсу. Тому при резервуванні ресурсів вважатимемо ресурсами пропускну здатність каналів зв’язку між вузлами, що визначає також пропускну здатність двох інтерфейсів, пов’язаних цим каналом. У свою чергу, кожний потік характеризується точкою входу в мережу, точкою виходу з мережі та профілем трафіка. Для отримання оптимальних рішень можна використати детальний опис кожного потоку, наприклад враховувати величину можливої пульсації трафіка або вимоги щодо QoS. Однак оскільки кількісно оцінити їхній вплив на роботу мережі досить складно, то для визначення субоптимального розподілу шляхів проходження потоків через мережу, як правило, враховуються тільки їхні середні швидкості передачі пакетів, що й показано на рис. 10.4.16.
Методи технології ТЕ частіше працюють не з окремими потоками, а з агрегованими потоками, які є об’єднанням декількох потоків. Оскільки здійснюється пошук спільного маршруту для декількох потоків, то агрегувати можна лише потоки, що мають спільні точки входу в мережу та виходу з мережі, а також близькі вимоги щодо якості обслуговування. Агрегування потоків дозволяє спростити задачу вибору шляхів, оскільки при індивідуальному розгляді кожного користувальницького потоку проміжні вузли мають зберігати занадто великі обсяги інформації, оскільки індивідуальних потоків може бути дуже багато.
Завдання технології ТЕ полягає у визначенні маршрутів проходження потоків трафіка через мережу, тобто для кожного потоку потрібно знайти точну послідовність проміжних вузлів і їхніх інтерфейсів. При цьому маршрути повинні бути такими, щоб всі ресурси мережі були завантажені збалансовано, а кожний потік отримував необхідну якість обслуговування.
Максимальний рівень використання ресурсів обирається таким чином, щоб механізми контролю перевантаження могли забезпечити необхідну якість обслуговування. У найбільш примітивному вигляді це полягає у тому, що для еластичного трафіка максимальне значення завантаженості мережного ресурсу вибирається не більше ніж 0,9, а для чутливого до затримок трафіка — не більше ніж 0,5. Оскільки на практиці резервування здійснюється не для всіх потоків, то потрібно залишити частину пропускної здатності для вільного використання. Тому наведені максимальні значення зазвичай зменшують до 0,75 і 0,25 відповідно. Наведені для прикладу числові значення обираються емпіричним шляхом, хоча в перспективі для їх розрахунку необхідно використовувати теоретично обґрунтовані адаптивні процедури.
Найчастіше використовують на практиці таку постановку та розв’язання задачі ТЕ: визначити такий набір маршрутів для заданої множини потоків трафіка, для якого всі значення коефіцієнтів використання ресурсів уздовж маршруту проходження кожного потоку не перевищують деякого заданого порога Kmax. На рис. 2.2.1.3 показано один з варіантів розв’язання цієї задачі для вихідних даних з рис. 2.2.1.1 і 2.2.1.2. Знайдені маршрути гарантують, що максимальний коефіцієнт використання будь-якого ресурсу для будь-якого потоку не перевищує 0,6.
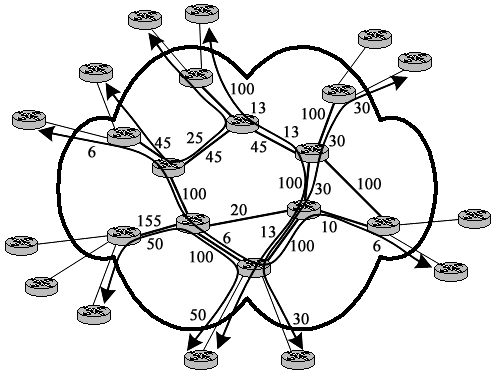
Рис. 2.2.1.3. Розподіл навантаження по мережі з вибором шляхів проходження трафіка
Розв’язання задачі ТЕ можна здійснювати по-різному:
у фоновому режимі (завчасно). Для цього потрібно знати максимальне (рекомендоване) значення коефіцієнта використання ресурсу та вихідні дані про стан мережі: топологію та продуктивність мережі, а також імовірні вхідні й вихідні точки потоків трафіка та середню швидкість передачі даних у них. Тоді розв’язання задачі ТЕ полягає у розрахунку шуканих маршрутів при фіксованих вихідних даних;
в оперативному режимі задача ТЕ, ґрунтуючись не на ймовірному, а на реальному профілю трафіка, розв’язується в реальному масштабі часу на вузлах мережі з використанням модифікацій існуючих протоколів маршрутизації. Модифікація протоколів маршрутизації полягає в тому, що вони повідомляють один одному не тільки топологічну інформацію, але й поточне значення вільної пропускної здатності кожного мережного ресурсу.
Після того як рішення знайдено, необхідно його реалізувати, тобто втілити в таблицях маршрутизації. На цьому етапі може виникнути проблема — у тому разі, якщо необхідно ці маршрути прокласти в мережі з дейтаграмним режимом передачі пакетів. Справа в тому, що таблиці маршрутизації цих мереж ураховують тільки адреси призначення пакетів. Вузли таких мереж (наприклад, ІP-мереж) не працюють із потоками, для них потік у явному вигляді не існує, кожний пакет при його просуванні є незалежною одиницею комутації. Можна сказати, що таблиці просування цих мереж описують тільки топологію мережі (напрямок просування до певних адрес призначення). Тому привнесення методів резервування в дейтаграмні мережі відбувається з великими труднощами, а на практиці методи інжинірингу трафіка сьогодні використовуються лише в мережах з віртуальними каналами, для яких не становить складності реалізувати знайдене рішення для групи потоків. Кожному потоку (або групі потоків з однаковими маршрутами) виділяється віртуальний канал, який прокладається відповідно до обраного маршруту. Методи інжинірингу трафіка успішно застосовуються в мережах ATM і Frame Relay, що працюють на основі техніки віртуальних каналів. Існує також технологія MPLS, яка розроблена спеціально як засіб привнесення техніки віртуальних каналів в ІP-мережі. В MPLS-мережах уже використовуються або планується використовувати модифіковані протоколи маршрутизації та сигналізації з відповідною приставкою ТЕ. На призначенні та задачах протоколів сигналізації, які використовуються для розв’язання задач забезпечення QoS, зупинимося в наступному підрозділі.
ВИСНОВКИ
В ході виконання реферату проаналізували інформацію про маршрутизатори та їх функціонал.
У наш час вони стали невід’ємною частиною життя багатьох людей.
Розвиток інформаційних технологій неминуче супроводжується розширенням комп'ютерних мереж як в плані збільшення числа під'єднаних до них комп'ютерів, так і в плані покриття такими мережами все більшої території.
Тож знати як працює маршрутизатор та як його правильно використовувати дуже актуально для кожного хто з ними пряцює.
ПЕРЕЛІК ВИКОРИСТАНИХ ДЖЕРЕЛ
1. Руденко В.Д., Макарчик О.М., Пагланжоглу М.О. «Практический курс информатики». Киев: Феникс, 1997.
2. Кульгин М. Технологии корпоративных сетей. Энциклопедия – СПб: Питер, 2000.
3. Гук М. Аппаратные средства локальных сетей. Энциклопедия. – СПб: Питер, 2001.
4. Конспект лекцій з комп’ютерних мереж.
Создание маштабируемых сетей Cisco. : Пер. с англ. – М. : Издательский дом «Вильямс», 2004. С.768.