

2 РОЗРАХУНКОВА ЧАСТИНА
2.1 Вихідні дані для розрахунку механізму підйому кран-балки Q=5т
Таблиця 2.1 - Вихідні дані
| № | Найменування | По паспорту крана | У системі СІ |
| 1. | Номінальна вантажопідйомність | mн=5 т | 49000 Н |
| 2. | Вага вантажозахватного пристрою | m0= 0,08 т | 784 Н |
| 3. | Лінійна швидкість підйому вантажу | V=12 м/хв | 0,2 м/с |
| 4. | Діаметр барабану | Dк=500 мм | 0,5 м |
| 5. | Передаточне число від двигуна до барабану | i=22 | 22 |
| 6. | Кратність поліспасту | K=6 | 6 |
| 7. | ККД механізму без поліспасту | m=87% | 0,87 |
| 8. | Висота підйому вантажу | H=16000 мм | 16 м |
| 9. | ККД механізму | пол=92% | 0,92 |
| 10. | Тривалість вмикання механізму | ПВ=15% | 0,15 |
2.2 Опис кінематичної схеми механізму підйому кран-балки

Рисунок 2.1 - Кінематична схема механізму підйому кран-балки
На рис.2.1: 1 – електродвигун; 2 – гальмівний шків; 3 – редуктор; 4 – барабан; 5 – поліспаст; 6 – вантажозахватний пристрій; 7 – вантаж.
Основні вимоги, які висуваються до електроприводів кранових механізмів полягають в наступному:
Забезпечення заданого діапазону зміни моменту двигуна (як при підйомі, так і при спуску вантажів).
Забезпечення заданого діапазону регулювання швидкості. Діапазон регулювання швидкості механізму головного підйому визначається, з однієї сторони, номінальною швидкістю підйому і спуску, а з іншої – зниженою швидкістю для установочних робіт чи посадочною швидкістю. Діапазон регулювання швидкості підйомних механізмів може коливатись в самих широких межах, досягаючи зрідка величин (40…50):1.
Плавність регулювання швидкості, що дозволить знизити ударні навантаження на механізм підйому при гальмуванні в кінці спуску чи підйомі.
Забезпечення високої жорсткості механічних характеристик, що є особливо важливим для механізмів підйому, в яких статичний момент змінюється в широких межах і які передбачають роботу на зниженій швидкості. В іншому випадку значення зниженої швидкості значно буде залежати від завантаження механізму.
Обмеження динамічних навантажень в елементах механічної частини ЕП (прискорень, моментів).
На початку підйому вантажу при зниженні напруги на затискачах двигуна до 90% номінальної повинна бути виключена можливість спуску номінального вантажу.
Аналіз найбільш характерного режиму роботи мостового крана дозволяє зробити припущення, що для привода механізму підйому доцільно використовувати системи електричного привода, які передбачають регулювання швидкості вниз від основної, а також дозволяють реверсування і електричне гальмування, мають підвищений пусковий момент тощо. Цим вимогам відповідає системи електроприводу типу ПЧ-АД.
2.3 Розрахунок та вибір потужності електродвигуна
2.3.1 Попередній вибір двигуна
Враховуючи, що при підйомі вантажу статичний момент на валу двигуна, як завжди незначно відрізняється від номінального моменту двигуна, найбільш легко вибрати двигун по статичній потужності при підйомі вантажу, яка визначається:
де - загальний ККД механізму;
=m∙пол; =0,92∙0,87=0,8; (2.2)
Визначаємо номінальну частоту обертання двигуна:
при цьому вибираємо двигун з nн найближчим до nдв.роз , не більш ніж (у межах +10%, -10%) розходження допускаються.
Вибираємо двигун типу MTКН 412-6 з коротко замкнутим ротором, ТВ = 25%, U = 380 В, = 50 Гц таб.3.1 с.245 [8]
- потужність – 30 кВт;
- частота обертання – 980 об/хв;
- струм статора – 60,5А;
- cos - 0,55;
- струм ротора – 42,0 А;
- напруга ротора – 255 В;
- максимальний момент – 932 Н · м;
- момент інерції – 2,7 кг∙м2.
2.3.2 Визначення статичних моментів
Визначення статичних моментів: при підйомі вантажу МСПГ при опус-канні вантажу МСОГ, при підйомі пустого вантажозахватного пристрою МСПО, при опусканні пустого вантажозахватного пристрою Мсоо. Пропонується гра-фічний спосіб. Згідно з цим способом спочатку необхідно визначити момент МСПГ та МСПО.
Рисунок 2.2 - Діаграма зміни статичного моменту механізму підйому кран-балки при зміні навантаження
2.3.3 Визначення динамічних моментів
Для стандартних магнітних контролерів типа КС, ТСА цей час визна-чається настройкою реле часу 1РУ, 2РУ, котре в сумі складає до 1,7 с. З ура-хуванням особистого часу спрацьовування контакторів приймаємо:
t0-1=t4-5=t8-9=t12-13=2с;
Визначаємо Мдин 0-1:
де
Визначаємо динамічний момент при розгоні на спуск вантажа (ділянка 4-5):
Визначимо динамічний момент, необхідний для зупинки двигунів при русі на спуск з вантажем:
Час зупинки t6-7 = 1c.
Визначаємо динамічний момент при розгоні механізму на підйом в холосту (ділянка 8-9):
Визначаємо Jприв.0.:
де
Визначаємо динамічний момент двигуна на ділянці 14-15 (зупинка при ході вниз вхолосту):
При цьому на підйом і на спуск використовуються стандартні характеристики відповідного магнітного контролера:
2.3.4 Визначення підсумкових моментів
Визначаємо результуючі моменти двигуна:
2.3.5 Визначення часу по ділянкам
Визначаємо час встановленого руху на підйом 1-2 та 9-10. Якщо весь шлях, пройдений вантажем, Н, то, знехтуючи шляхом 2-3, що проходить механізм при зупинці, отримаємо:
Так само визначаємо t9-10:
Н9-10=16-0,19=15,81 м;
Час t5-6=t13-14, тому:
Визначаємо час пауз:
де
 (2.31)
(2.31)

2.3.6 Побудова навантажувальної діаграми роботи механізму підйому кран-балки
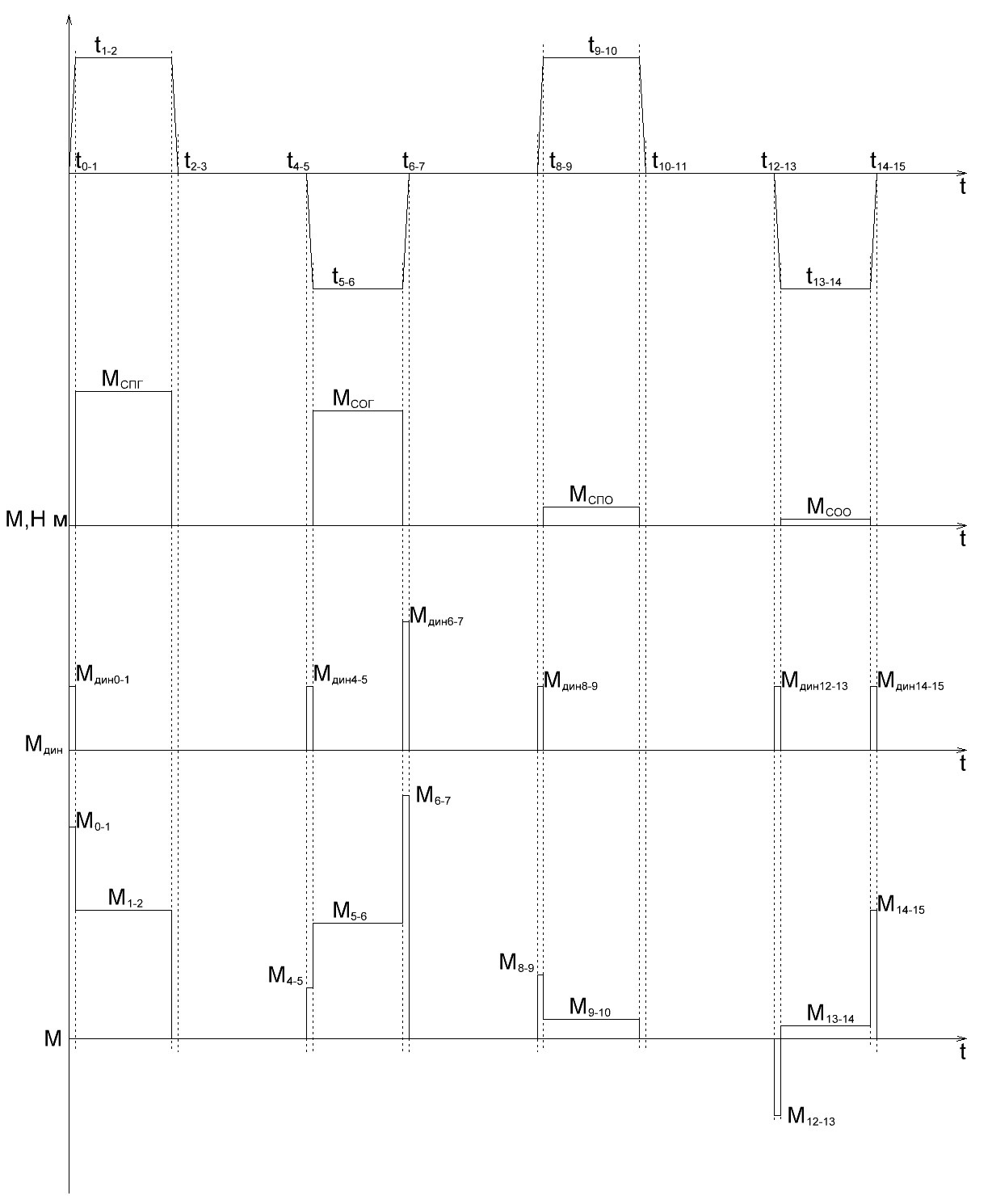
Рисунок 2.3 - Діаграма роботи механізму підйому кран-балки
1 2 3