
Лекція 1. Структура та принципи побудови сучасних АСУ ТП
План:
1.1 Структура АСУ ТП
1.2 Класифікація технічних засобів регулювання і управління
1.1 Структура АСУ ТП
Рисунок 1.1 – Ієрархічна структура АСУ ТП
Структура сучасних АСУ ТП має ієрархічний характер і включає в себе п'ять груп технічних засобів автоматики, розташованих на чотирьох рівнях (рис. 1.1). На нижньому (першому) рівні розташовуються засоби, що виконують функції отримання, обробки інформації та впливу на процес.
На другому рівні розташовуються засоби для локального контролю і автоматизації (в їх склад входять і засоби першого рівня), призначені для побудови одноконтурних систем регулювання окремих параметрів складних об'єктів. На цьому рівні засоби представлені приладами контролю і локальними регуляторами температури, тиску, витрат, рівня і т.д.
На третьому рівні технічні засоби включають в себе машини централізованого контролю і регулювання, агрегатовані регулюючі комплекси, мікроконтролери. Ці пристрої дозволяють реалізувати багатозв'язне і каскадне регулювання, логічні операції, перебудову алгоритму управління в процесі роботи, реалізацію математичних операцій та ін.
На четвертому рівні розташовані керуючі обчислювальні комплекси, які дозволяють здійснювати обробку великих масивів інформації, реалізувати складні алгоритми управління об'єктом, а також рішення оптимізаційних, планово-економічних та обліково-статистичних завдань. Технічно цей рівень утворюють засоби комплексу персональних ЕОМ.
У загальному випадку систему автоматичного управління (САУ) будь-якого рівня можна представити у вигляді схеми (рис. 1.2).
Керований параметр Хп з ОУ і задане значення Хз параметра з задавача ЗП через пристрій порівняння у вигляді сигналу помилки Х подається на КП, який виробляє управляючий вплив Y, який надходить через головний зворотний зв'язок (ГЗЗ) на ОУ. В результаті цього впливу параметр Хп приймає значення Хз або змінюється за певним законом, але, знову-таки, відповідно до зміни Хз.
У загальному випадку сукупність взаємодіючих між собою певним чином об'єкта управління і керуючого пристрою називають системою автоматичного управління (САУ).
Рисунок 1.2 – Структура САУ
За характером алгоритму функціонування САУ поділяють на системи стабілізації, системи програмного управління і стежачі системи. У перших з них керований параметр підтримується на постійному (заданому) значенні. У програмних системах параметр автоматично змінюється відповідно до визначеного наперед заданого закону, що є функцією часу. В стежачих системах керований (ведений) параметр відтворює всі зміни вхідного (провідного) параметра, тобто «стежить» за ним.

Рисунок 1.3 – Перехідний процес в САР стабілізації
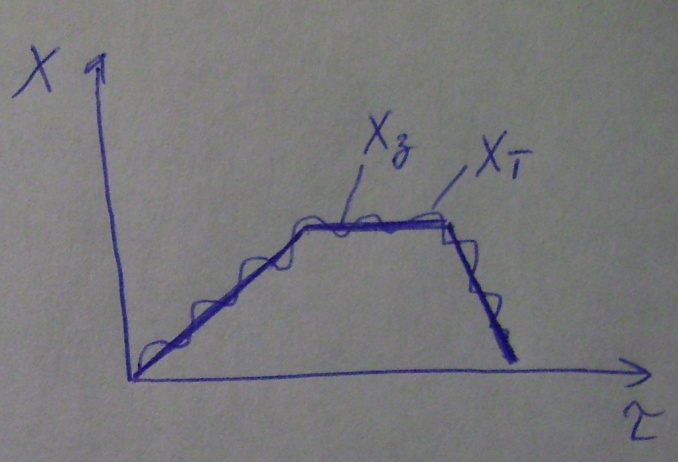
Рисунок 1.4 – Перехідний процес в САР програмного управління
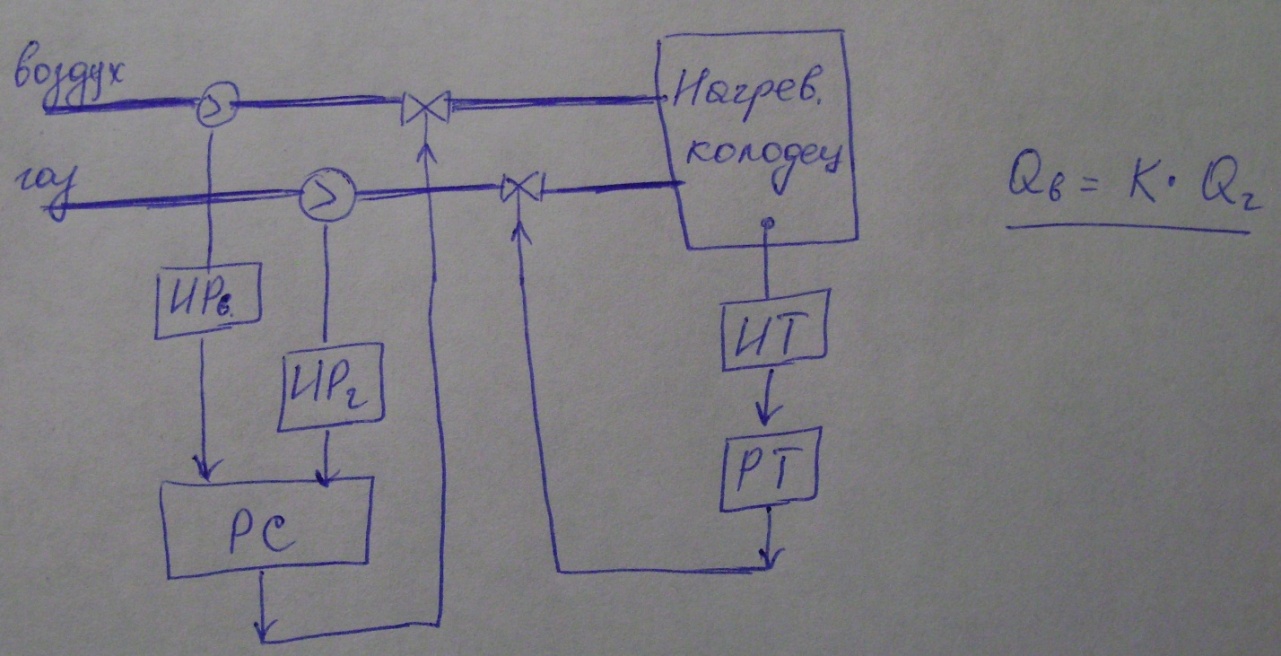
Рисунок 1.5 – Приклад слідкуючої САР
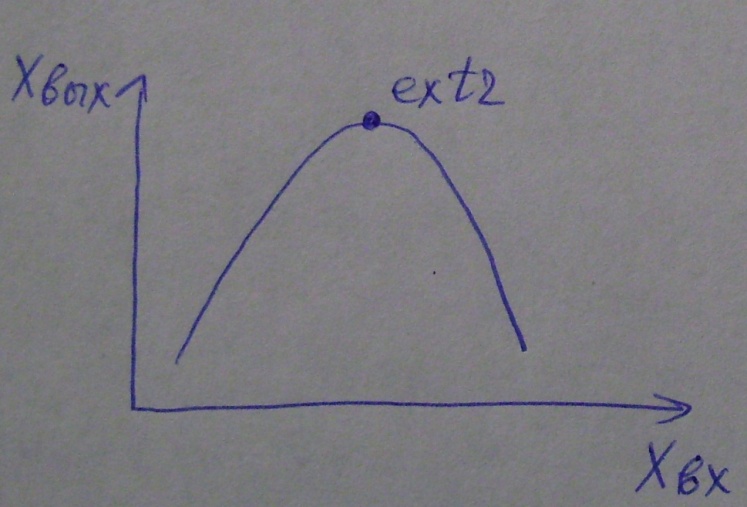
Рисунок 1.6 – Статична характеристика ОУ в екстремальній САР
Особливу групу САУ складають системи екстремального керування, які знаходять і підтримують такі значення своїх управляючих впливів на об'єкт, при яких керований параметр досягає найбільшого або найменшого значення (екстремуму).
Сучасні САУ другого, третього і четвертого рівнів будуються, як правило, за агрегатним принципом, тобто з використанням різних агрегатних комплексів (АК) технічних засобів автоматики. АК являють собою сукупність технічних засобів вимірювальної, регулюючої та обчислювальної техніки, які характеризуються інформаційною, конструктивною, метрологічною та експлуатаційною сумісністю і призначені для вирішення певних завдань автоматичного контролю і управління.
На рис. 1.7 показана структурна схема локальної САУ, побудованої за агрегатним принципом.
Рисунок 1.7 – Розширена структурна схема САР
На командно-підсилювальний пристрій (власне регулятор) 2 надходить сигнал помилки Х, що виробляється пристроєм порівняння 12, на який подається поточне значення Хп керованого параметра (від вимірювального блоку 10 регулятора), і задане Хз (від задавача 1). Регулятор 2 на підставі обраного оператором закону (алгоритму) управління формує вихідний сигнал, який через блок ручного управління 3 надходить на пусковий пристрій 4. Цей пристрій пускає в хід виконавчий механізм 5 (силову частину регулятора), який, в свою чергу, впливає на регулюючий орган 7, з якого на агрегат 8 подається керуючий вплив Y, в результаті чого вхідний параметр (наприклад, витрати палива, якщо регулюється температура в робочому просторі агрегату) змінюється. Зміна цього параметра відбувається до тих пір, поки Хп не стане рівним Хз.
Значення керованого параметра Хп вимірюється первинним перетворювачем 9. Відхилення Хп від Хз відбувається в результаті різних обурюючих об'єкт впливів Z.
В САУ агрегатного типу регулятор отримує інформацію про Хп безпосередньо від первинного перетворювача. Два інших перетворювача 9 служать для вимірювання (в комплекті з вимірювальними приладами 11) параметра Хп.
В САУ приладового типу інформація на регулятор надходить від вимірювального приладу 11, при цьому при виході з ладу останнього вся система стає непрацездатною. Крім того, агрегатний принцип дозволяє нарощувати САУ різними блоками і модулями, розширюючи її функціональні можливості.
До складу регулюючого (керуючого) пристрою зазвичай входять: вимірювальний блок 10, блок формування закону регулювання 2, пусковий пристрій (пускач) 4, виконавчий механізм 5 і задавач 1. До складу об'єкта управління – власне технологічний агрегат 8, вимірювальний перетворювач 9 і регулюючий орган 7.
Вимірювальний перетворювачвимірює відхилення керованого параметра від заданого значення. Пристрій, за допомогою якого це задане значення може бути встановлено, називається задавачем.
Вимірювальний блок спільно з задавачем утворюють пристрій формування сигналу помилки.
Формуючий блок регулятора формує закон (алгоритм) регулювання (П-закон, ПІ-закон і ін.).
Пусковий пристрій підсилює вихідний сигнал регулятора до величини, достатньої для приведення в дію виконавчого механізму.
Виконавчий механізм служить для зміни положення регулюючого органу.
Регулюючий орган – це пристрій, який безпосередньо змінює кількість речовини або енергії; встановлюється прямо на технологічному об'єкті.
Крім перерахованих засобів, до складу САУ входять: блок ручного управління 3, покажчик положення регулюючого органу 6 і пристрій сигналізації 13.
Блок ручного управління(станція управління) служить для переведення САУ з автоматичного режиму управління на дистанційний і навпаки; для цієї мети він обладнується універсальним перемикачем і кнопковою станцією.
Покажчик положення – це вимірювальний прилад, що фіксує ступінь переміщення регулюючого органу.
Пристрій сигналізації інформує обслуговуючий персонал при відхиленні керованого параметра за небезпечно допустимі межі.
1.2 Класифікація технічних засобів регулювання і управління
В сучасних САУ використовуються комплекси технічних засобів, сумісні за інформаційними і конструктивними параметрами і створені за принципами агрегатування і блочно-модульної побудови. Уніфікація ТЗА дозволяє обмежити різноманіття параметрів і технічних характеристик, конструктивних особливостей виконання, принципів дії і т.п.
За способом і видом використовуваної енергії для формування сигналу управління розрізняють електричні, пневматичні, гідравлічні і комбіновані системи.
Електричнісистеми дозволяють передавати сигнали управління на великі відстані, легко компонуються в більш складні комплекси, але вибухонебезпечні; виконавчі механізми інерційні і вимагають спеціальних заходів щодо поліпшення їх динамічних характеристик.
Пневматичніпозбавлені цих недоліків, їх виконавчі механізми мають більші зусилля перестановки. Однак системи живлення вимагають ретельної підготовки повітря, герметизації ліній.
Гідравлічні мають хороші динамічні характеристики, але вимагають дводротової лінії зв'язку і, так само, як і пневматичні, діють на обмеженій відстані.
Частково вище зазначені недоліки усуваються поєднанням електричних, пневматичних і гідравлічних систем, тобто в комбінованих системах.
За характером використовуваної і видаваної інформації ТСА САУ діляться на чотири групи:
аналогові, в яких вхідна і вихідна інформація є безперервними функціями часу;
імпульсні, де використовується система імпульсних кодів, що характеризують значення параметра в дискретні моменти часу;
цифрові, в яких інформація циркулює у вигляді числових кодів, що характеризують значення параметра в дискретні моменти часу;
комбіновані, в яких використовуються перетворювачі аналогових величин в дискретні і здійснюється зворотне перетворення дискретних величин в аналогові сигнали.
Вибір тієї чи іншої системи визначається вимогами, що пред'являються до ефективного управління технологічним процесом.
По виду керованого параметра ТСА САУ діляться на технічні засоби управління температурою, тиском, витратами, рівнем, складом і змістом речовини та ін.
За способом дії автоматичні регулятори поділяються на регулятори прямої і непрямої дії.
За конструктивним виконанням пристрою управління бувають приладові й блочно-модульні. Регулятори приладового типу працюють тільки в комплекті з вторинними вимірювальними приладами і не мають безпосереднього зв'язку з первинним вимірювальним перетворювачем. Регулятори другого типу складаються з окремих уніфікованих блоків і модулів, що виконують найпростіші операції (підсумовування, множення, добування кореня, диференціювання та ін.).
Відповідно до числа керованих параметрів пристрої управління поділяються на одноканальні (аналогові регулятори) і багатоканальні.
До багатоканальних САУ відносяться системи, в яких використовуються керуючі ЕОМ.
Залежно від кількості сигналів, що надходять на вхід регулятора від датчиків, він називається одно- або багатоімпульсним.
По виду функціонального зв'язку між входом і виходом САУ розрізняють системи переривчастої (дискретної)ібезперервної дії. Дискретні, в свою чергу, поділяються на системи релейні та імпульсні. У цих САУ використовуються відповідно релейні та імпульсні регулятори.
Для управління технологічними процесами в більшості випадків використовуються системи з технічними засобами автоматики електричної гілки як найбільш універсальні.