
6. Проект прив’язування планово-висотних опорних точок
Для прив’язки опорних точок, тобто визначення координат та висот опорних точок, використовують такі геодезичні методи:
а) полігонометричні ходи другого розряду та теодолітні ходи, прокладені між пунктами тріангуляції та полігонометрії IV класу, або першого розряду;
б) прямі обернені та комбіновані засічки, а також полярний метод з вимірюванням контрольного кута на визначуваному пункті;
в) висоти опорних точок визначаємо нівелюванням технічної точності. Ходи мають мають опиратися на вихідні репери чи пункти запроектованого полігонометричного ходу.
Проектуємо прив’язування всіх опорних точок на карті. Складаємо загальний перелік опорних точок, називаючи методи прив’язування кожної опорної точки:
ОПВ-1, ОПВ-2, ОПВ-3, ОПВ-6, ОПВ-5 - прив’язані ходом полігонометрії 4 класу;
ОПВ-8, ОПВ-9, ОПВ-12, ОПВ-15 - прив’язані ходом полігонометрії 4 класу;
ОПВ-1,ОПВ-4,ОПВ-7, ОПВ-10, ОПВ-13 - прив’язані полігонометричним ходом 4 класу;
ОПВ-11, ОПВ-14 - прив’язані прямою засічкою.
Згідно інструкції гранична похибка положення пунктів планової знімальної мережі, серед них і ОПВ, відносно пунктів геодезичної основи не мають перевищувати 0,2 мм у масштабі карти (у масштабі 1:5000 на місцевості становитиме 0,2 мм5000=1 м).
Вважаємо, що 1м - це похибка в положенні найслабшого пункту ходу. Тоді його допустима нев’язка допfS =2м, а після зрівноваження похибка становитиме 1 м.
Тепер знайдемо допустиму довжину ходу.
Оскільки
де Т- відносна похибка ходу.
За цією формулою отримаємо допустиму довжину теодолітного ходу 4 км (Т=2000), а ходу полігонометрії 2-го розряду - 10км (Т=5000).
Хід протягнутий між пунктами з відомими координатами, а кути ходу попередньо ув’язані, то похибка М буде відноситись до середньої точки ходу і обчислюватись за формуло:
 ,
,де n - кількість сторін ходу; L - довжина ходу прив’язки, виміряна на карті; m - гранична похибка виміру кута.
Для ходу полігонометрії 2-го розряду mгран=10, а величина
1) ОПВ-1, ОПВ-2, ОПВ-3, ОПВ-6, ОПВ-5 - прив’язані ходом полігонометрії 4 класу, в якому n=5, L=8.5км, Sсер=1700. Тоді отримаємо:
М=0,83 м 1м.
Висновок. Планове положення опорних точок, прив’язаних полігонометричним ходом 4 класу, визначаються з достатньою точністю, оскільки
2) ОПВ-8, ОПВ-9, ОПВ-12, ОПВ-15 - прив’язані ходом полігонометрії 4 класу, в якому n=5, L=7.5км, Sсер=1505. Тоді отримаємо:
М=0,74 м 1м.
Висновок. Планове положення опорних точок, прив’язаних полігонометричним ходом 4 класу, визначаються з достатньою точністю, оскільки
2) ОПВ-1,ОПВ-4,ОПВ-7, ОПВ-10, ОПВ-13 - прив’язані полігонометричним ходом 4 класу, n= 12, L=7.3км , Sсер=608. Тоді отримаємо:
М=0,56 м 1м.
Висновок. Планове положення опорних точок, прив’язаних полігонометричним ходом 4 класу, визначаються з достатньою точністю, оскільки
Для прив’язки ОПВ прямою засічкою похибку у плановому положенні обчислюємо за формулою:
 ,
,де S1 i S2 - довжини 2-х (з 3-х) напрямів;
- кут між цими двома напрямами;
Опорну точку ОПВ-11 прив’язуємо прямою засічкою
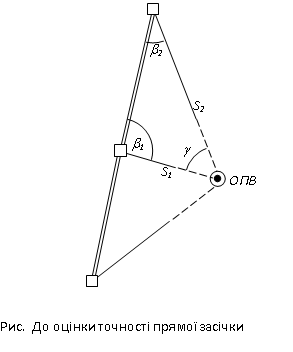
Рис. До оцінки точності прямої засічки
1=775 м; S2=1450 м; =52
Згідно з формули прямої засічки маємо:

Висновок. Похибка планового положення ОПВ-11 не перевищує допуску, оскільки М 1м
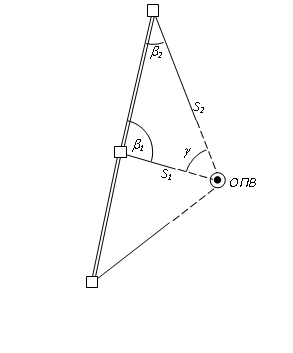
Рис. До оцінки точності прямої засічки
Опорну точку ОПВ-14 прив’язуємо прямою засічкою1=350 м; S2=1225 м; =10930′
Згідно з формули прямої засічки маємо:

Висновок. Похибка планового положення ОПВ-14 не перевищує допуску, оскільки М 1м і становить 0,04м.
1 2 3 4 5 6 7 8 9