
Ім'я файлу: kfzao_18073.doc
Розширення: doc
Розмір: 1752кб.
Дата: 27.03.2021
скачати
Пов'язані файли:
ОМ-Силабус-ЕОЕП-КП.docx
СР 4 ад розщ. .docx
Cheredaryk_bakalavr.docx
Розширення: doc
Розмір: 1752кб.
Дата: 27.03.2021
скачати
Пов'язані файли:
ОМ-Силабус-ЕОЕП-КП.docx
СР 4 ад розщ. .docx
Cheredaryk_bakalavr.docx
Відомі числові значення параметрів системи й діючих сигналів наведені в табл. 2.9. Залежність перерегулювання від коефіцієнта демпфірування в системі другого порядку зазначено в табл. 2.10.
Таблиця 2.9
| Вар. | k | Т1, с | Т2, с | koc | k1 | k2 | k3 | g0 | z0 | u1уст | u2уст | u3уст | yуст | , % |
| 5 | 5 | 0.4 | 0 | 0.5 | * | * | 0 | 0 | 5 | * | * | – | * | 5 |
Необхідно:
Виконати аналіз об'єкта регулювання.
Визначити числові значення невідомих параметрів регулятора (позначених *), що забезпечують компенсацію «великої» постійної часу і задане перерегулювання = 5 %.
Визначити сталі значення сигналів u1уст, u3уст, yуст при дії на входах постійних сигналів g0 = 0 ; z0 = 5 .
Розрахувати статичне відхилення (статичну помилку).
Створити модель АСР в MATLAB/Simulink і побудувати криву перехідного процесу, по якій оцінити показники якості регулювання: перерегулювання; час регулювання з точністю 5 %; статичне відхилення (статичну помилку); число коливань і ін.
На основі точної ЛЧХ на ПЕОМ визначити запаси стійкості по модулю й фазі. Оцінити ці ж параметри по асимптотичній ЛАЧХ і порівняти результати.
Зробити висновки за результатами досліджень.
Таблиця 2.10
Залежність перерегулювання від коефіцієнта демпфірування
у системі другого порядку
| | 0,1 | 0,2 | 0,3 | 0,4 | 0,5 | 0,6 | 0,7 | 0,8 | 0,9 | 1,0 |
| , % | 73 | 53 | 37 | 25 | 16 | 9 | 5 | 1,5 | 0,3 | 0 |
Рішення
АНАЛІЗ ОБ'ЄКТА РЕГУЛЮВАННЯ
Відповідно до завдання для розглянутого варіанта структурна схема об'єкта регулювання (ОР) набуде вигляд, представлений на рис. 2.7.
 U(t) W01(p) W02(p) Y(t) 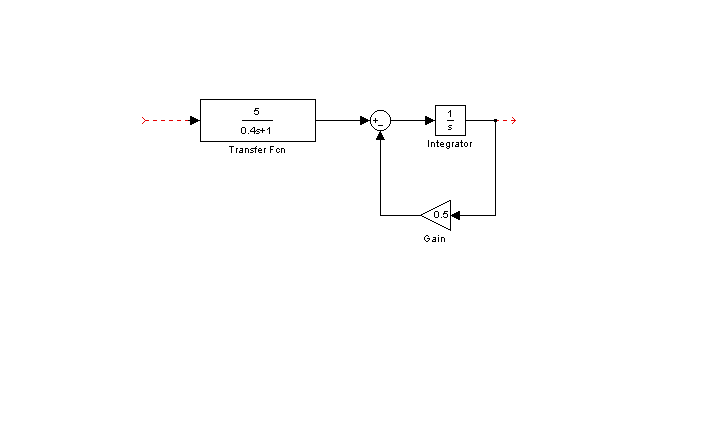 |
| Рис. 2.7. Структурна схема ОР |
Функція передачі ОР
| | (2.1) |
Визначимо тип першої ланки об'єкта. Функцію передачі цієї ланки можна записати у вигляді
| | (2.2) |
Ця ланка є аперіодичною першого порядку.
Друга ланка об'єкта являє собою інтегратор, охоплений негативним зворотним зв'язком, і його функція передачі
 | (2.3) |
У результаті одержали інерційну ланку першого порядку.
Таким чином, функцію передачі об'єкта набуде вигляд
| | (2.4) |
Далі необхідно вибрати параметри регулятора, що забезпечують компенсацію «великої» постійної часу Т2 = 2 і перерегулювання = 5 %.
1 2 3 4 5 6 7 8 9 10