
Схеми з’єднання. На рис.7.9 показана функціональна схема з’єднання 3- х пристроїв до загальної шини через RS-485 інтерфейс. Напівдуплексна система дозволяє в один момент часу вузлу передавати інформацію, а в інший приймати. Передавач та приймач кожного вузла підключається до єдиної шини, тобто контакт „А” кожного передавача та контакт „А’ ” кожного приймача (штрихом позначені контакти приймачів) підключаються до загального лінії „А”, так само і контакти „В” та „В’” підключаються до лінії
„В”. Таким чином, коли передавач одного вузла передає послідовність бітів, всі приймачі інших вузлів їх приймають. В один момент часу тільки один передавач може бути активним, його стан управляється з боку самого пристрою дозволом передачі.
RS-485 не визначає вимоги до середовища передачі. Як правило використовують екрановану виту пару. На рис.7.9 показана 3-х провідна схема, однак на практиці нерідко використовують 2-х провідну (без
сигнальної землі). Для реалізації 2-х провідної схеми з’єднання достатньо однієї витої пари, трьох-провідної – подвійної витої пари (пара сигнальних проводів, пара земляних).
Бітова швидкість вибирається в залежності від сумарної довжини лінії, характеристик кабелю, і, як правило, приводиться в документації до обладнання у вигляді номограм.
Схеми узгодження. При великих
швидкостях і при значних відстанях необхідно вирішити проблему відбиття сигналу на кінцях лінії. Основою для мінімізації відбиття є використання узгоджуючих резисторів з номіналами, які відповідають хвильовому опору кабелю. Як правило в промислових мережах використовують кабель з характеристичним імпедансом 120 Ом, тому на рис.7.10 на
трансивер RS485
 TD
TDG
дозвіл передачі
R
RD
A(-)
RT B(+) С
обох кінцях шини між лініями „А” і „В” підключений узгоджувальний резистор (термінатор) з відповідним опором.
Рис. 7.10. Схема RC узгодження
На практиці виникає необхідність паралельного підключення до шини джерела постійного струму (розглянуто нижче). Резистори представляють активний опір, тому розсіють певну потужність, що вимагає використання більш потужних джерел струму. Це спонукає до використання альтернативних схем узгодження. Добавлення конденсатора послідовно з резистором виключає протікання постійного струму, і не створює бар’єру для високочастотного сигналу.
Забезпечення захисного зміщення Реалізація інтерфейсу передбачає, що при відсутності бітів для передачі трансмітер переходить у високоімпедансний стан. При сигнальній "тиші" всі трансивери на шині будуть працювати в режимі прийому. Оскільки жоден трансмітер не буде генерувати сигнал, на шині буде 0В. Для більшості мереж, зокрема для тих, які працюють в символьному режимі, відсутність передачі обов’язково позначається певним рівнем сигналу, наприклад логічною "1". Однак при напрузі на входах приймачів від -200мВ до 200мВ, вихідний стан залишається невизначеним. У цьому випадку логічна „1” або „0” на виході RD приймачів рівноймовірні (або запам’ятовують попередній стан).
Така ситуація неприпустима. В момент інформаційної тиші необхідно тримати сигнал напруги певної величини за допомогою зовнішнього джерела постійного струму, який підключається між сигнальними проводами A та B, тобто необхідно забезпечити зміщення потенціалу відносно нуля.
Всю лінію можна представити як замкнутий ланцюг із опорів ресиверів та двох термінаторів, що підключені паралельно. Задача захисного зміщення зводиться до забезпечення цього ланцюгу таким струмом, щоб напруга на ній
 була в межах, що відповідає логічній "1", тобто >200мВ. У більшості
була в межах, що відповідає логічній "1", тобто >200мВ. У більшостівипадків підключають джерело напруги TD
трансивер RS485
RС
A(-)
5 В, і підбирають такі шунтуючі опори, щоб забезпечити ланцюг необхідним струмом. Ці опори отримали назву
G
R
T
B(+)
резисторів захисного зміщення (bias R resistors): резистор завдання RD початкового високого рівня (pullup) –
на одній лінії, наприклад „В”, і низького
RС
+5В
рівня (pulldown) – на другій лінії, наприклад „А” (рис.7.11). Значення опору резистора зміщення залежить від виду узгодження (термінування) і
Рис. 7.11. Використання резисторів захисного (RC) зміщення разом з узгоджувальними резисторами (RT)
кількості вузлів тобто приймачів, підключених до шини. Номінали опорів зміщення розраховують виходячи з необхідного мінімального струму зміщення в мережі для забезпечення різниці потенціалів між А і В >200мВ.
6. Порівняльна характеристика стандартних послідовних інтерфейсів
Для порівняння інтерфейсів, розглянутих вище, найбільш важливі характеристики зведені в таблицю 7.2.
Таблиця 7.2
Порівняльні характеристики послідовних інтерфейсів.
| Назва, стандарт | EIA RS- 232C | EIA RS-422A | EIA/TIA-485, RS-485 | 20 мА „струмова петля”,CL, ИРПС, |
| Тип сигналу | Напруга, асиметричн ий | Напруга, диференційни й симетричний | Напруга, диференційни й симетричний | струм |
| Режим з’єднання | дуплекс | дуплекс | напівдуплекс, дуплекс | дуплекс |
| Максимальна кількість передавачі/прийма чів | 1/1 | 1/10 | 32/32 (при опорі приймачів 12кОм) | 1/1 у багаточкових схемах залежно від реалізації |
| Максимальна | 20 м | 1200 м | 1200 м | декілька км |
| відстань (приблизно) | | | | |
| Максимальна бітова швидкість (приблизно) | 115200 біт/с | 10 Мбіт/с | 10 Мбіт/с | 1 Мбіт/с |
При використанні RS-485 кількість приймачів вказана рівною 32, це при опорі приймачів 12кОм. При інших опорах, наприклад 48кОм, максимальна кількість приймачів відповідно буде 128. В інтерфейсі „струмова петля” 20 мА кількість передавачів/приймачів залежить від конкретної реалізації. Для всіх інтерфейсів (окрім RS-232С) максимальна бітова швидкість залежить від багатьох факторів: довжина лінії зв’язку, тип кабелю, рівень завад, способи узгодження ліній і т.ін.
Вибір інтерфейсу для реалізації мережі залежить від багатьох факторів. В більшості випадків пристрій може підтримувати тільки один визначений інтерфейс. Для зв’язку з іншими пристроями дуже ймовірне використання адаптерів-перетворювачів інтерфейсів, які розглянуті в наступному підрозділі.
При побудові шинних топологій як правило користуються RS-485. Інколи використовують також багатоточкове з’єднання по інтерфейсу "струмова петля". Якщо необхідне з’єднання точка-точка – вибирають дуплексний зв’язок, оскільки, при тих самих бітових швидкостях досягається майже в 2 рази більша швидкість передачі даних, за рахунок подвійного каналу. У цьому випадку можна використати RS-422А або RS-485 в дуплексному режимі (якщо обладнання дає можливість організувати таке з’єднання). RS-232 популярний при з’єднанні пристроїв з ПК.
Поряд з розглянутими інтерфейсами існує ряд інших. Один з найбільш популярних інтерфейсів являється USB, який практично витіснив СОМ-порт (RS-232) та паралельний порт з персональних комп’ютерів.
Використання адаптерів-перетворювачів інтерфейсів Типи адаптерів-перетворювачів.
Для вирішення задач несумісності
інтерфейсів існують адаптери-перетворювачі (конвертери) інтерфейсів. Адаптер можна представити у вигляді пристрою, що має два різні інтерфейси. Задача даного пристрою електрично перетворити вхідні сигнали RD одного інтерфейсу у вихідні TD іншого. Можливі випадки з’єднань пристроїв з різними інтерфейсами: RS-422A <–> RS-485, RS-232 <–> Current Loop 20 mA, RS-232 <-> RS-485.
Зупинимося на принципах роботи адаптерів RS-232С <-> RS-485 більш детально, оскільки вони одні з найбільш поширених в промисловості. Нагадаємо, що передавачі в системі RS-485 повинні підтримувати можливість відключення від лінії зв’язку, якщо трансивер не передає дані. Однак передавачі RS-232 разом з UART при відсутності передачі видають логічну "1". Тобто, при звичайному схемному рішенні електричного
перетворення сигналу з RS-232 в RS-485, передавач RS-485 ніколи не відключиться, що недопустимо в шинних топологіях. Таким чином в конвертері повинно бути забезпечене переключення передавача RS-485 зі сторони RS-232 в активний чи пасивний (високоімпедансний) стан. Виробники адаптерів вирішують цю проблему по різному. Розглянемо декілька способів.
R
Управління адаптером RS-232<->RS-485 зі сторони RS-232. Один із варіантів вирішення проблеми управління станом трансмітера RS-485 є використання одного з сигналів управління потоком зі сторони інтерфейсу RS-232C: RTS або DTR. На рис.7.12 показана модель перетворювача, який управляється сигналом RTS. Перетворювач умовно поділений на 2 частини з відповідними інтерфейсами. Коли пристрій з RS-232C має передавати дані, він активує передавач адаптера за допомогою RTS, виставляючи на цій лінії логічну „1”. Далі він надсилає послідовність бітів в символьному вигляді по лінії TD. Перетворювач за допомогою схемних рішень відсилає цей сигнал на передавач адаптера зі сторони RS-485. Оскільки той вже активований, цю ж послідовність він видає на лінію інтерфейсу RS-485. Так буде тривати, поки пристрій зі сторони RS-232С не зніме „1” з RTS, що приведе до переключення передавача в високоімпедансний (неактивний) стан.

Рис. 7.12. Управління передавачем адаптера RS-232<->RS-485
сигналом RTS
Алгоритм управління сигналом RTS для RS-232C може бути різним. Для комп’ютерів, як правило, налаштовують роботу СОМ-порту так, щоб сигнал RTS виставлявся автоматично в „1”, коли буфер передачі заповнений байтами, і „0”, коли він пустий. Для СОМ-порту це нормальний режим роботи з апаратним управлінням потоком.
При наведеному способі реалізації перетворювача можлива ситуація передчасного відключення сигналу RTS до передачі трансмітером RS-485 останнього біту. Такі проблеми повинні вирішуватись на пристрої зі сторони інтерфейсу RS-232C. Ще одна з проблем заключається в тому, що не всі пристрої вміють управляти сигналом RTS. У цьому випадку існує інший, більш універсальний спосіб управління передавачем адаптера.
Автоматичне управління адаптером RS-232<->RS-485. Цей метод у різних фірм називається по різному: Automatic Send Data Control (ASDC), Automatic Data Direction Control (ADDC), Automatic RTS Signal Control (ARSC), але всі вони базуються на принципі управління по сигналу даних, які передаються (рис.7.13). Тобто адаптер сам відслідковує, коли включати і коли відключати передавач по даним, які надходять зі сторони RS-232. Один з варіантів такої реалізації – відслідковування приймального буферу. Як тільки адаптер з боку RS-232 отримав перший біт символу (стартовий біт) − відразу активує передавач. Оскільки біт в стані логічної „1” не може триматися більше часу одного символу, то після паузи відсутності логічного
R
„0” протягом певного часу (не менше тривалості одного символу), конвертер буде ще тримати передавач в активному стані, після чого переведе його в високоімпедансний стан. Якщо затягнути цю паузу, може виникнути ситуація, коли інший передавач в системі зі сторони RS-485 захоче передати дані (адже лінія вже звільнилася) і виникне колізія.

Рис. 7.13. Управління передавачем адаптера за сигналом даних, що передаються.
Адаптери з управлінням по сигналу даних по приймальному буферу користуються більшою популярністю ніж адаптери з управлінням сигналами RTS чи DTR.
Ще один з методів управління передавачем, який не знайшов широкого використання, по сигналу зі сторони пристрою з інтерфейсом RS-485. Останній для цього повинен мати спеціальну сигнальну лінію (аналогія з RTS), яка передбачена саме для цього. Коли пристрій з RS-485 планує передавати дані, він переводить перетворювач в стан прийому, тобто вимикає передавач. Специфіка таких перетворювачів заключається в тому, що використати їх можна тільки в режимі точка-точка, що сильно звужує коло їх використання. Такий перетворювач не накладає ніяких вимог по управлінню на пристрій з RS-232C, що звісно ж таки повинно компенсуватись зі сторони RS-485.
Література: [1], розділ 3 (3.7-3.14).
Запитання для самоперевірки
Поясніть необхідність синхронізації, що таке синхронна та асинхронна передача на фізичному рівні?
Які схеми з’єднання між пристроями доступні при використанні інтерфейсу RS-232? Що таке нуль-модемне з’єднання?
Перерахуйте електричні характеристики інтерфейсу RS-232. Які основні недоліки даного інтерфейсу?
Які типи роз’ємів визначені інтерфейсом RS-232? Розкажіть про призначення всіх контактів 9-пінового роз’єму.
Яким чином організовано управління потоком даних при символьному способі передачі по RS-232?
Перелічіть електричні характеристики RS-422. Які основні переваги даного інтерфейсу порівняно з RS-232?
Перелічіть електричні характеристики RS-485. Які основні переваги даного інтерфейсу порівняно з RS-422?
Modbus Application Porotocol
План
Мережі MODBUS в контексті моделі OSI
Модель даних пристрою Modbus
Реалізація MODBUS на прикладному рівні
Формат основних функцій
Мережі MODBUS в контексті моделі OSI
MODBUS на сьогоднішній день є одним з найбільш популярних протоколів. Основна причина такої популярності – це простота в реалізації. На сьогоднішній день MODBUS підтримує і розвиває організація MODBUS.ORG, вона забезпечує відкритість даного протоколу та розробляє готові компоненти для спрощення реалізації. Згідно стандартів MODBUS.ORG – MODBUS являється протоколом прикладного рівня для зв’язку типу Клієнт-Сервер між прикладними Процесами пристроїв, які під’єднані до Modbus-мереж. В контексті OSI-моделі, ці мережі мають архітектуру, наведену на рис.8.1.


TCP

 прикладний
прикладний MODBUS on TCP
транспортний мережний
 канальний фізичний
канальний фізичнийTU MODBUSASCII
MODBUS+
MODBUSTCP/IP
Рис.8.1. MODBUS в контексті OSI-моделі
MODBUS на сьогоднішній день представлений 4-ма мережами: MODBUS RTU та ASCII (Modbus over Serial Line), MODBUS Plus і MODBUS TCP/IP. Ці мережі використовуються для різних цілей, зокрема:
обмін даними процесу SCADA/HMI з ПЛК, чи іншими інтелектуальними засобами (електроприводами, лічильниками, засобами розподіленого вводу/виводу, тощо);
обмін даними процесу між ПЛК;
обмін даними процесу ПЛК з іншими інтелектуальними засобами;
обмін параметричними даними конфігураторів з ПЛК а також іншими інтелектуальними засобами;
Модель даних пристрою MODBUS
Основна ідея функціонування обміну даними по мережам Modbus в тому, що усі вузли мережі, вірніше їх прикладні процеси (програми) діляться на дві категорії: ті, які мають дані і ті, яким ці дані потрібно прочитати або змінити. Ті процеси які мають дані, звуться Modbus Клієнтами, а ті, які ці дані хочуть прочитати чи записати – Modbus Серверами.
Протокол Modbus був розроблений для зв’язування контролерів Modicon. Тому з боку Cерверу, який як правило являв собою ПЛК, передбачалося використання змінних з 4-х областей памяті (рис.8.2):
дискретні входи, іншими словами вхідні біти (Input Bits)
дискретні виходи, або котушки (Coils)
аналогові входи, або вхідні регістри (Input Register, 16-бітові)
аналогові виходи, або вихідні/внутрішні регістри (Holding Registers,
16-бітові)
Кожна область памяті вміщує комірки, які адресуються, починаючи з 1. Крім того, ці області мали номери. Так, наприклад, область Input Registers починається з комірки 30000. Усі інші комірки розміщуються в адресах, номер яких послідовно збільшується. Таким чином, при розробці проекту для ПЛК інженер-програміст вказував які комірки пам’яті за які канали відповідає. А пристрій Modbus-Клієнт, який захотів прочитати чи записати цю комірку, звертався до неї за номером та області памяті, в якому вона знаходиться.
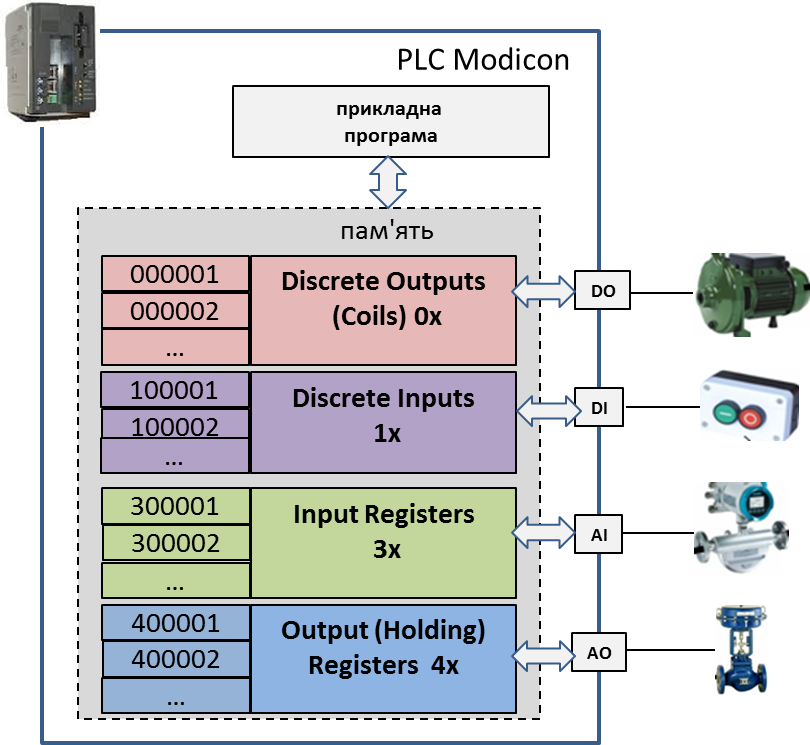
Рис.8.2. Області памяті згідно MODBUS
Слід зазначити, що комірки з усіх зон памяті доступні для читання. Однак для запису доступні тільки комірки з областей Holding Registers та Coils, адже вхідні дані міняються тільки залежно від значення вхідних каналів.
Не дивлячись на цілком логічну архітектуру пам’яті ПЛК Modicon, на практиці нерідко необхідно обмінюватися іншими даними. По переше протокол Modbus використовується зараз для звязку не тільки з ПЛК Modicon. По друге, в якості Modbus Серверів, як ми вже зазначали вище, може бути взагалі не контролер, а наприклад перетворювач частоти. Тому для обміну внутрішніми змінними, параметрами регуляторів, тощо потрібні інші типи комірок пам’яті. Тому виробники пристроїв самі вирішують як на самому ділі організована пам'ять пристрою і як вона зв’язується з комірками згідно Modbus. Тобто в самому пристрої йде відображення (Mapping) реальних комірок пам’яті на комірки визначені в Modbus (рис.8.3). За якими правилами проводиться це відображення, визначається самим виробником пристрою. Тому спеціалісту необхідно ознайомитися з документацією на даний пристрій, перш ніж з’єднуватися з ним по протоколу Modbus.
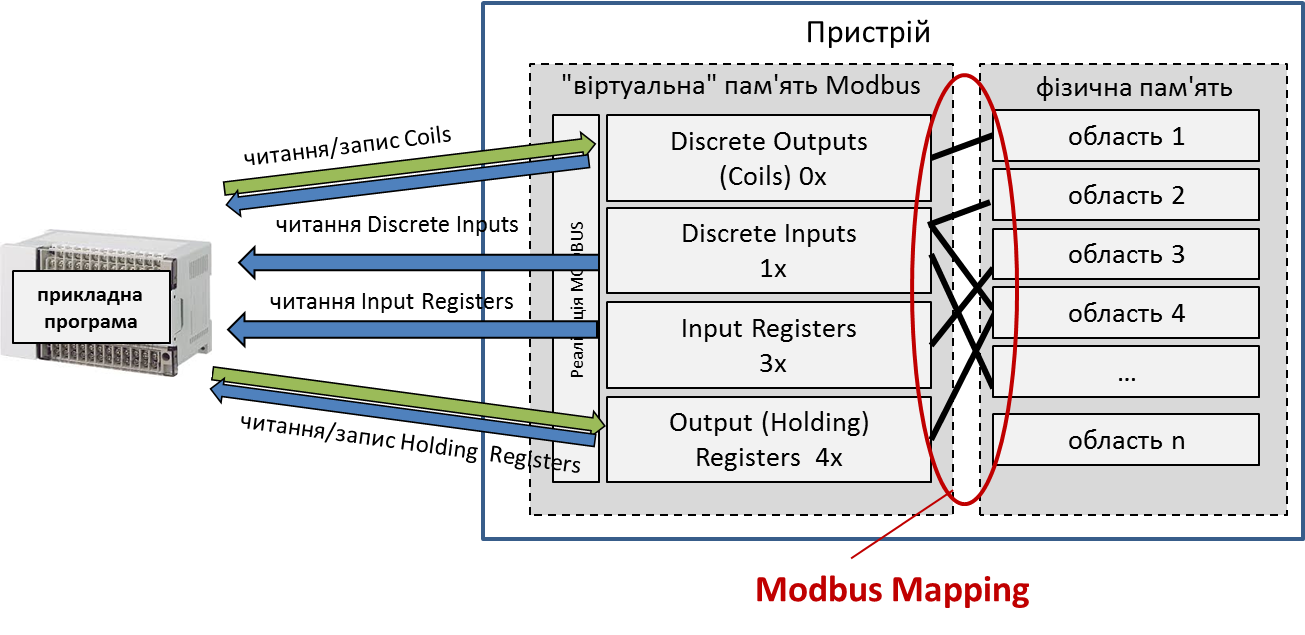
Рис.8.3. Відображення реальних комірок памяті на віртуальну пам’ять MODBUS
Реалізація MODBUS на прикладному рівні
MODBUS Application Protocol (MBAP
повідомлення MODBUS PDU

 MODBUS протокол прикладного рівня) базується
MODBUS протокол прикладного рівня) базується  на моделі Клієнт-Серверного обміну повідомленнями і визначає формат повідомлень MODBUS PDU (Protocol Data Unit), які мають
на моделі Клієнт-Серверного обміну повідомленнями і визначає формат повідомлень MODBUS PDU (Protocol Data Unit), які маютьвигляд наведений на рис.8.4. Клієнтський прикладний Процес робить повідомлення-запит до серверного Процесу, в якому в полі „код
Рис.8.4. Формат повідомлення
MODBUS PDU.
функції” вказує йому на дію, яку необхідно провести. Байти даних вміщують інформацію, яка необхідна для виконання даної функції. Серверний прикладний Процес у випадку вдалого виконання цієї функції повторює код функції у відповіді (якщо запит передбачає відповідь). При виникненні помилки, код функції у відповіді модифікується (старший біт виставляється в
а в байтах даних передається причина помилки. Тобто, якщо при передачі клієнтським прикладним Процесом повідомлення-запиту з функцією 0316 (000000112) виникла помилка у її виконанні Сервером, той відішле відповідь з полем функції рівним 8316(100000112). В доповненні до зміни коду функції, при помилці, Сервер розміщує в поле даних унікальний код, який вказує на тип і причину помилки.
Код функції являє собою поле з одного байту, яке може приймати значення від 1 до 255 (коди 128-255 зарезервовані під коди повідомлень- відповідей при помилкових діях). Нижче розписані тільки ті функції, які призначені для доступу до даних процесу, що наведені в попередньому пункті.
У повідомленні-запиті за полем коду функції можуть слідувати дані, які уточнюють або доповнюють функцію допоміжною інформацією. Це можуть бути адреси змінних, їх кількість, лічильник байтів даних, що
передаються та самі дані для запису. Для певних функцій, поле даних може бути відсутнім взагалі. Максимальна довжина повідомлення прикладного рівня рівна 253.
Формат основних функцій
Повний список кодів а також специфікацію протоколу можна знайти на офіційному Веб сайті www.MODBUS.org. Скорочення в дужках Hi та Lo вказують відповідно на старший та молодший байти слова. Тобто, якщо для вказівки адреси початкової змінної необхідно двобайтове слово, то значення старшого байта буде передаватись в полі з позначенням Hi, а молодшого – відповідно Lo. Індекс 16, значить, що числа вказуються в 16-ковому форматі.
1 2 3